
Current Work
We are currently developing new experiments to demonstrate the benefits of a supervisory autonomous control framework, as well as, determine the proper implementation and combination of tactile sensing and display through psychophysical testing.
Previous Work
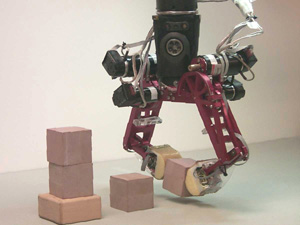 Experiments
in dexterous telemanipulation with haptic feedback
Experiments
in dexterous telemanipulation with haptic feedback
For more information see the following publications.
W.B. Griffin, R.P. Findley, M.L. Turner, and M.R. Cutkosky, "Calibration and Mapping of a Human Hand for Dexterous Telemanipulation", Presented at ASME IMECE 2000 Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems
M.L. Turner, R.P. Findley, W.B. Griffin, M.R. Cutkosky, and D.H. Gomez, "Development and Testing of a Telemanipulation System with Arm and Hand Motion", Presented at ASME IMECE 2000 Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems
| |
| |
| |
| |
| |