|
|
|
|
|
|
Two Experimental Tests
|
|
|
|
|
|
 |
|
|
|
|
|
|
Note:
The tasks described below can be seen in this MOVIE!!
(45 MB) |
Telemanipulation Task Descriptions
A diverse set of ten subjects were asked
to perform two prototypical manipulation tasks in order to evaluate the
performance of the system. Each subject had the CyberGlove® calibrated
to their hand, and the mapping
to the robot hand (object-based) was customized to best allow the robot
fingers to follow the motions of the subject'sfingers.
Subjects performed each task twelve times,
six with force feedback from the CyberGrasp® and six without it in a pattern
of AAAA-BBBB-AA-BB, where A is one force mode (on/off) and B is the other. The
pattern was selected in an effort to minimize the effect of learning. Each subject
has a trial with each force mode near the end of the task set, and time to completion
analysis was performed on each subject's best run under each condition. In order
to eliminate order-sensitive issues, a random determination was used to select
whether a subject began with force feedback on or off. The time to completion
of each trial was measured, as well as the subject's success in completing the
task.
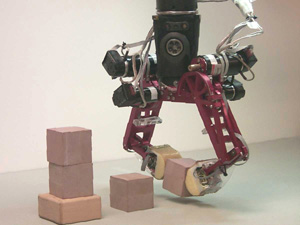
Block Stacking
The subjects were asked to construct a
tower of four blocks upon a target location, as seen in the pictures below.
This test examines whether the presence of the internal forces displayed by
CyberGrasp affects performance of a primarily pick-and-place.
Qualitatively, most of the subjects preferred
the force feedback mode. During the run, comments such as "That feels nice,"
and "The forces tell you where you are and what is going on," were
common. Upon completion of all the tasks, all subjects said they felt more comfortable
with the forces on in this task. Some subjects pointed out that the forces could
still mislead you, however. One subject mentioned that touching the table felt
exactly the same as touching the object, since the CyberGrasp can only pull
in one direction.
Quantitatively, however, there was no significant
time difference between a subjects best performance with force feedback and
their best performance without force feedback. A likely reason for the overall
lack of time difference between the two modes, besides human muscle memory and
proprioception, is that a significant portion of the task involved moving the
larger and slower industrial robot arm. Conditions for moving the arm were identical
in the two force modes and likely contributed significantly to the overall time.
Object Rolling
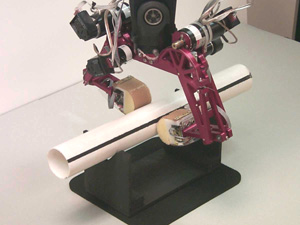 The
subjects were asked to use the robot fingers to roll a cylinder through a full
360° rotation, as seen in the figure to the right. The purpose of this task
was to examine the effect of the CyberGrasp force feedback on performing two
fingered dexterous manipulation. The
subjects were asked to use the robot fingers to roll a cylinder through a full
360° rotation, as seen in the figure to the right. The purpose of this task
was to examine the effect of the CyberGrasp force feedback on performing two
fingered dexterous manipulation.
The task began with the 400 mm long by
50 mm diameter cylinder resting in two V-shaped notched supports near the ends
of the cylinder. The robot hand was located above the cylinder. The subject
was instructed to lower the hand and rotate the object through a full clockwise
rotation. If the subject knocked the cylinder off of the stand, the attempt
was considered to be unsuccessful.
This task demonstrated the varying levels
of mapping quality. One subject rotated the object with nearly flawless two
fingered manipulation on his first attempt, with a time lower than many subjects'
best performance. Other subjects struggled to coordinate their finger motions
even after several trials.
 |
It was fairly clear from
watching the subjects that the addition of force feedback actually impeded
their ability to roll the object quickly. The chart to the left shows the
ratio of best run without force feedback over best run with force feedback
for each subject. The average ratio across subjects was 0.72 (a ratio of
1.0 would indicate no difference in performance due to force feedback, while
a ratio less than one indicates faster completion time without force feedback).
Thus, on average, the subjects' best run without force feedback was 28%
faster than their best run with force feedback. Using a bootstrap t-test
to resample our data, we can state with 95% confidence that the mean population
ratio would be 0.72±0.16, illustrating that force feedback has a
negative effect on subject performance time with respect to this task. |
 On
the other hand, the chart to the right displays that our subjects were three
times more likely to have a trial failure without force feedback as compared
to with force feedback (a 10% failure rate compared to a 3.3% failure rate).
Analyzing the data with a bootstrap t-test to examine whether the population
is more likely to have a failure without force feedback, we get an alpha significance
level of 20%. This is not significant enough to state strongly, but it is a
promising indication and should be examined further. On
the other hand, the chart to the right displays that our subjects were three
times more likely to have a trial failure without force feedback as compared
to with force feedback (a 10% failure rate compared to a 3.3% failure rate).
Analyzing the data with a bootstrap t-test to examine whether the population
is more likely to have a failure without force feedback, we get an alpha significance
level of 20%. This is not significant enough to state strongly, but it is a
promising indication and should be examined further.
These results are confirmed by the qualitative
comments made by the subjects. One subject pointed out that the system does
not provide a sensation of curvature or rolling. Another subject said, "The
forces don't match what I see, so I don't know how to adjust my hand."
The difficulty of the task may be due in part to the uncommon motion. One subject
pointed out that she really wanted to grasp the cylinder and turn it with her
wrist.
These results indicate that the single
axis of force representation provided by the CyberGrasp does not sufficiently
represent the expected forces for rolling an object, and the potentially misleading
information slows the user more than having no force information. Rolling of
an object uses regulation of the ratio of normal to tangential forces, which
cannot be accurately displayed by this system. However, the presence of contact
force information does seem to improve a user's ability to maintain a stable
grasp and aid the task learning process.
Conclusions
The results indicate that the CyberGrasp
force feedback system does not increase speed of performance for simple telemanipulation
tasks such as block stacking and object turning. This is due in part to human
skills in learning and muscle memory, as well as the imperfect force transparency
due to the single degree of actuation.
Conversely, there is some evidence that
force feedback improves manipulation stability and may benefit the task learning
process. Subject responses indicate that force feedback?s benefits may be more
apparent in tasks which require delicacy or precision. One pointed out ?It seemed
a little more difficult with the forces, because you are taking care where your
fingers are.... Otherwise, you just pinch as hard as possible.? and another
said, ?Without forces you aren?t worried about damaging the machine or forcing
things.? |
