
Vibrotactile Display Contact Display
 We
are interested in providing additional channels of haptic feedback to
create a more intuitive interface for the teleoperator system. Our current
system is capable of displaying one-dimensional grasp force using the
Immersion CyberGrasp
force feedback device. In addition to this, we have fabricated vibrotactile
feedback devices that fit on the back of the users fingers.
We
are interested in providing additional channels of haptic feedback to
create a more intuitive interface for the teleoperator system. Our current
system is capable of displaying one-dimensional grasp force using the
Immersion CyberGrasp
force feedback device. In addition to this, we have fabricated vibrotactile
feedback devices that fit on the back of the users fingers.
During the simplest of manipulation tasks, we use dynamic cues from cutaneous
mechanoreceptors. When tracing a finger over a surface, features as small
as a few micrometers high are easy detected. However, without motion they
are imperceptable. Researchers have found simple ways to implement dynamic
feedback and found it effective in improving performance during simple
telemanipulation experiments such as block stacking, bearing inspection
or controlled piercing of a membrane [Kontarinas
& Howe]. Taking inspiration from these researchers, we have pl aced
small voice-coil actuator assemblies on the thumb and forefinger of teleoperators.
The actuators use include a small proof-mass glued to the cone of ordinary
earbud headphone speaker. The assembly is pressfit into a FDM'd
(Fused Deposition Modeled) housing and sewn onto the fingertips of an
isotoner glove. Dynamic signals from skin accleration
sensors are directly amplified, using ordinary audio amplifiers, and
used to drive the voice-coils.
aced
small voice-coil actuator assemblies on the thumb and forefinger of teleoperators.
The actuators use include a small proof-mass glued to the cone of ordinary
earbud headphone speaker. The assembly is pressfit into a FDM'd
(Fused Deposition Modeled) housing and sewn onto the fingertips of an
isotoner glove. Dynamic signals from skin accleration
sensors are directly amplified, using ordinary audio amplifiers, and
used to drive the voice-coils.
![]()
In the absence of vision or in cases with partially obstructed vision we
rely more strongly on sensed contact location during object manipulation.
Most people can locate their eye glasses in the dark of night by groping (haptic
exploration) near the location they remember leaving them.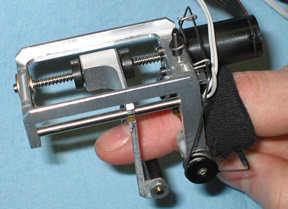 Once located, we use contact location information to stably grasp them. A
teleoperated dexterous robot hand would have great difficulty performing this
delicate task with the current state of dexterous manipulation. We have designed
a simple haptic display to feedback contact location from robotic fingertip
contact sensors directly to the fingertip of the teleoperator. Our hypothesis
is that contact location is critical for maintaining a stable grasp while
manipulating an object with obstructed vision.
Once located, we use contact location information to stably grasp them. A
teleoperated dexterous robot hand would have great difficulty performing this
delicate task with the current state of dexterous manipulation. We have designed
a simple haptic display to feedback contact location from robotic fingertip
contact sensors directly to the fingertip of the teleoperator. Our hypothesis
is that contact location is critical for maintaining a stable grasp while
manipulating an object with obstructed vision.
The contact display employs a linear actuator to position a small roller along the teleoperator's fingertip. The device is grounded to the finger using a FDM'd ring lined with foam and covered with lycra/spandex cloth (design shown below). A small lead screw drives the roller back and forth over the operator's finger using a DC motor, encoder and PD controller. Contact locations on the semi-circular robot fingertip are directly mapped to the 20 mm linear range of the roller carriage.
![]()
Contact Display Ring Design & Manufacturing
A family of rings were manufactured to fit an array of finger sizes. Initially, rings were roughly sized to fit "average sized" men and women. Human factors design is always difficult for such devices, so we envision normalizing ring sizes to human factors data available from sources such as "The Measure of Man and Woman: Human Factors in Design" published by Henry Dreyfuss associates.
Rings were designed using the Solid Edge solid modeler. We used a Stratasys FDM3000 (Fused Deposition Modeler), available on campus in the PRL, to create rapid prototypes of rings used to ground the contact display to the index finger of teleoperators. FDM is a layer deposition technique used to create physical prototypes by slicing up an object into layers (typically 500 microns thick) and then building a part by depositing melted thermoplastic polymer a layer at a time. The software which slices the solid model into pieces also adds "support" material where necesary, which is removed after the part is built. This is shown below.
After removal of support material, we then coat the rings with superglue to increase durability. We have found that infiltrating the ABS parts with cyanoacrylate or epoxy resins significantly improves part strength. The rings were designed with a thin foam lining to help accomodate small differences in finger shape and size. Small cutouts in the foam improve breathability.The rings are covered with lycra/spandex cloth for improved comfort, appearance and wear. The final step is to bond a washer with close tolerance hole onto each side of the ring. These washers are bearings for attaching the chasis of the linear actuator
 |
Solid Model of Ring (A family of rings were designed using the Solid Edge solid modeler.) |
|
 |
Ring directly from FDM machine (The black ABS support material can be removed in a special ultrasonic solution bath, however we remove support material mechanically to reduce contamination during resin infiltration)
|
|
 |
Ring with support material removed (The ABS is infitrated with cyanoacrylate resin to improve part strength)
|
|
 |
Ring with foam lining (Note cutouts in foam to improve breathability.)
|
|
 |
Completed Ring (The ring is covered with lycra/spandex cloth for improved comfort, appearance and wear. Washers with close tolerance holes are bonded onto each side of the ring and act as bearings for attaching the chasis of the linear actuator.) |
![]()
References
D. A. Kontarinis and R. D. Howe "Tactile display of vibratory information in teleoperation and virtual environments," Presence, 4(4):387-402, 1995.
![]()
| |
| |
| |
| |
| |