
Supervised Dexterous Telemanipulation with Haptic Feedback
Our goal is to enhance the dexterity and sensitivity of dexterous telemanipulation. Our hypothesis is that supervised dexterous telemanipulation will provide a solution where autonomous robots have been impractical and current telemanipulation systems are clumsy and difficult to use. The approach is based on the integration of tactile sensing and semi-autonomous control into the overall bilateral telemanipulation system. In this way, an operator can use a combination of direct telemanipulation and commands sent to a semi-autonomous manipulation system to guide the robot and its dexterous hand. The concept is depicted in the figure below.
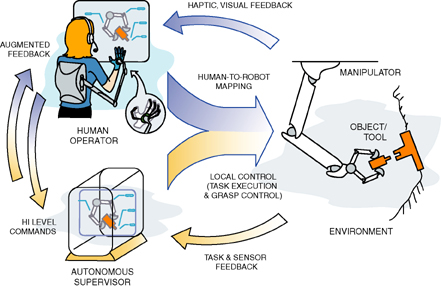
The current telemanipulation system is comprised of robotic arm and hand equipped with force and tactile sensors. An instrumented glove is worn by the operator to measure hand configurations which are in turn mapped to the robotic hand. Additionally, an arm mounted feedback device applies forces to the operators fingertips based on the robotic hands interaction with the environment.
Our research activities to date have focused on the development of additional hardware and software necessary to create a supervised dexterous telemanipulation system. Software development has centered around establishing a framework for supervised dexterous control. Hardware development has focused on prototyping and implementation of tactile sensing and display. The goal of this hardware development is to provide the user with sensory cues we rely on during ordinary manipulation. Determining the proper implementation and combination of tactile sensing and display is the subject of near term evaluation. This evaluation will include psychophysical testing as well as suitability for use in supervisory control. See links under Research header for more information.
| |
| |
| |
| |
| |