
The telemanipulation system consists of several key components. The master side is made of the CyberGlove and CyberGrasp. Custom software to calibrate each user for the glove is discussed in the CyberGlove Calibration section. A transformation method was developed to map the user's hand motion to the robotic hand motion. More detailed information can be found in the Mapping Methods section.
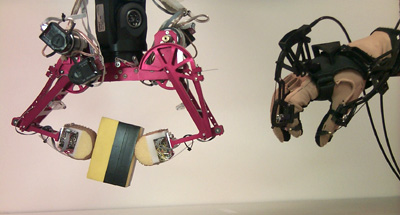
The slave side consists of a custom designed robotic hand which is attached to a standard industrial robot serving as the robotic arm. Additional information on the design of the robotic hand is covered in the Robot Design section. Details on the algorithms and software necessary to use an industrial robot in a teleoperation setup can be found in the Adept Robot section. The robotic arm is controlled be the operator using a Wrist Tracking device.
| |
| |
| |
| |
| |