|
Developing a User Mapping
Once a user is calibrated
to the CyberGolve we then customize the mapping parameters and transformation
parameters. The transformation parameters include rotation angle and
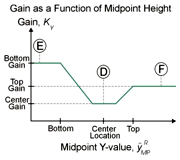
translation offsets. Object mapping parameters include gain values,
gain blend sizes, center gain location. In all there are 17 parameters
which are modified to give the user the best utilization of the workspace
while maintaining the an intuitive feel. Using a custom Graphical User
Interface, the parameters can be modified real-time. A virtual robotic
hand display within the GUI is initially used to setup the parameters
to avoid any problems with poor mapping parameters with the robotic
hand running. Once the parameters are adjusted using the virtual display,
the user's motion is connected to the robotic hand and the parameters
are further tuned for the best possible mapping.
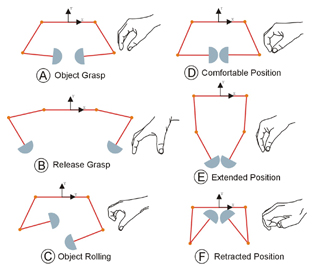
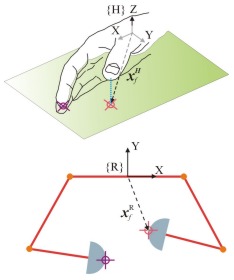
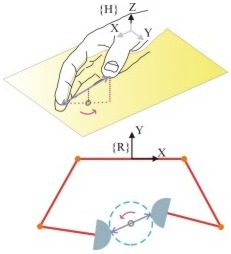
Ideally, if the mapping
parameters are adjusted to match the typical positions A,B,D,E, and
F, then the user should be able to roll a virtual object about his/her
comfortable manipulation position and the robot will in turn roll an
object about the ideal manipulation position (C) and still be able to
reach most of the robot's workspace.
Mapping Method Results
 Under
the point-to-point mapping method one can see that the index finger
maps fairly well to the left robot finger workspace. However, the thumb
motion is mapped to a relatively small area roughly along a vertical
line. This is partially due to using the planar project of the thumb
motion. Also, the large number of points outside the robotic hand workspace
leads to a distortion in the mapping. The robot will go to the closest
possible position at the edge of the workspace. It is also important
to note that the natural pinch point does not match the robot's ideal
manipulation point. Under
the point-to-point mapping method one can see that the index finger
maps fairly well to the left robot finger workspace. However, the thumb
motion is mapped to a relatively small area roughly along a vertical
line. This is partially due to using the planar project of the thumb
motion. Also, the large number of points outside the robotic hand workspace
leads to a distortion in the mapping. The robot will go to the closest
possible position at the edge of the workspace. It is also important
to note that the natural pinch point does not match the robot's ideal
manipulation point.
Under the object-based mapping
method the index finger motion lies almost completely within the robot's
workspace. More importantly, the motion of the right finger, the thumb,
has been greatly expanded. Also, the pinch point matches the ideal manipulation
position directly.
Method Conclusions
The object based mapping method
does show considerable improvement over the point-to-point method. However,
there are some drawbacks associated with the method. The motion of the
thumb and index finger are coupled, thus individual finger exploration
is difficult. Also due to the large number of parameters there are varying
degrees of success.
Mapping Method Extensibility
While object mapping method concept
has been demonstrated using a particular robotic hand, the mapping method
is a general technique and is extensible to any planar robotic hand.
By modifying the mapping parameters, particularly the nonlinear gain
functions, the motions of the human hand can be mapped to a new
robot workspace. One caveat that must be observed when performing the
nonlinear mapping is that, in some cases, relatively small motions of
the human fingers could result in large motions of the robot fingers.
Thus it may be desirable to plot corresponding velocity ellipsoids.
|

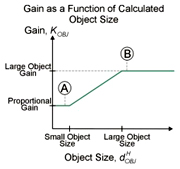
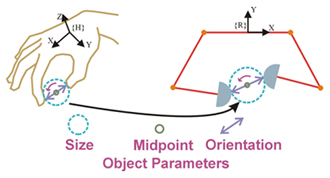
 The
size of the virtual object is calculated from the 3D distance between
the thumb and index finger.
The
size of the virtual object is calculated from the 3D distance between
the thumb and index finger.