|
|
|
|
|
|
|
|
|
|
| Introduction
|
|
| MOTIVATION | |
 Figure 1 Blaberus Discoidalis |
Legged locomotion has long been an attractive alternative to wheels or tracks for mobile robots. Legged animals have the ability to negotiate rough terrain and obstacles far more easily than wheeled vehicles of similar size. However, current legged robots enjoy neither the simplicity of wheels nor the versatility of legged animals. Although statically-stable walking robots have been demonstrated capable of operating in environments inaccessible to wheeled systems, in order for legged systems to compete effectively with wheels and tracks, they must become fast and robust. |
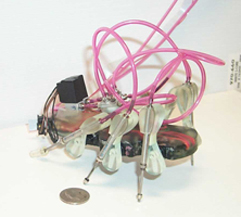 Figure 2 "Sprawlita", 3rd generation hexapedal prototype (click for movie, 12Mb) Figure 2.2 Go to Go to Go to |
Thus, we draw particular biological inspiration on the robust performance of small arthropods. Full has shown that the cockroach Blaberus Discoidalis (Figure 1) can scramble over a fractally-distributed collection of obstacles up to three times its body height (Full et al., 1998). They do this without flipping over or even appreciably slowing down.
Moreover, it has been observed that during locomotion through this rough terrain, the basic motor pattern sent to the muscles did not notably change. There is no precise foot-placement, no follow-the-leader gait. Inspired by these findings, two recent robot prototypes have demonstrated that robots driven by a simple motor pattern can achieve fast and robust locomotion by properly introducing compliance into the robot and tuning the mechanical properties of the system. Both Sprawlita (Figure 2), developed here at Stanford, and RHex, developed at U. Michigan and McGill U. (Saranli, et al., 2000) can overcome uneven terrain with large obstacles. They do this with only one active degree of freedom per leg that is driven by a clock-based motor pattern without any feedback. Simple robots are capable of robust complex behavior. However, designing and tuning the properties of Sprawlita has been a largely arbitrary process. The leg configuration was inspired by the functional behavior of each of the cockroach's leg, but the stiffness and damping in the joints were chosen ad hoc. While this implies that there is a large range of mechanical properties that will result in dynamically-stable locomotion, we have no design guidelines with which to predict and alter the resulting behavior (see Figure 2.2). This motivates the approach taken here for robot design. Given a desired behavior that we want to impart to our system, we find the system parameters that will result in that type of behavior. For this application, we want our robots to locomote in the same fast and robust manner as the cockroach. Thus, the problem is to find the appropriate hip and leg stiffness and damping values of the simple robot that will result in similar speed and disturbance-rejection capabilities as the complex cockroach. |
| PREVIOUS WORK | |
 Figure 3 Raibert Hopper Figure 4 Go to |
Much work has been done in optimizing system parameters to obtain target motions, though for somewhat different motivations. Work in the biomechanics community seeks to gain insight into muscle coordination for performance (for example, Pandy et al., 1990). Work in the animation community seeks to develop tools to synthesize motion that maintain realism by constraining the motion to the dynamics of the system (for example, Witkin and Kass, 1988, see Figure 4).
Work in the robotics community motivated by locomotion has traditionally focused on making complex systems act as simple systems. For example, control structures for statically-stable walking robots coordinate the legs to impart a desired position or velocity to the body. The pioneering research by Raibert (1986) and others who have followed his work demonstrated that fast locomotion can be achieved by robots that behave like SLIP's (Spring-leg inverted pendulums, see Figure 3). Subsequent robots and research has focused on coordinating multiple legs to act as a singular spring-like leg. This axiom is further validated by studies of locomotion in various animals that reveal similitudes to the SLIP model. The approach taken here is similar to Popovic and Witkin (1999), in which a dynamically consistent simplified model is fit to captured motion, edited, and then remapped back into the complex model. That is, we want to make a simple model behave as the complex model. |