|
|
|
|
|
|
|
|
|
|
| Robot Design by Animation Jorge Cham, 05/24/2000 |
|
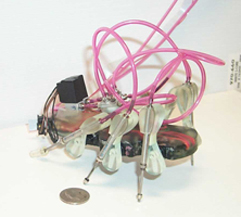 "Sprawlita", a simple but fast robot prototype (go to website)
|
Legged animals have the ability to negotiate rough terrain and obstacles far more easily than wheeled vehicles of similar size. However, legged robots up to date enjoy neither the simplicity of wheels nor the versatility of legged animals.
Recent research in biomechanics suggests that robust locomotion is not entirely the result of a carefully controlled reflex-driven system, but rather the product of a well-tuned mechanical system and a feed-forward motor pattern. This document describes initial work that considers an alternative approach to designing simple robots for fast robust locomotion. Though simply-designed robot prototypes with impressive performance have been built, tuning the mechanical properties of these robots is still difficult. We begin by taking a model of a simple robot that consists of passive mechanical elements. Using kinematic motion data of a fast and robust runner, the cockroach, we infer the properties of the mechanical system that will achieve the same type of motion. Results to date suggest that there is a range of solutions to the inference problem which may result in similar motion that is dynamically stable, but with differing abilities to reject disturbances in locomotion. Also included is an initial analysis of formulating the dynamic model as a hybrid system and finding the maximum disturbances that will maintain the system within a safe boundary.
NOTE 1: The figure and movie pop-ups don't seem to work with older versions of Internet Explorer. Please use Netscape. NOTE 2: This web document contains many Quicktime movies. This was done so that the reader can step through some of the image sequences (use the arrow keys). Quicktime can be downloaded here. contact: Jorge Cham jgcham@cdr.stanford.edu (all images and movies in these hypertext documents are copyrights of Jorge Cham) |