
Hardware Description
Control Overview
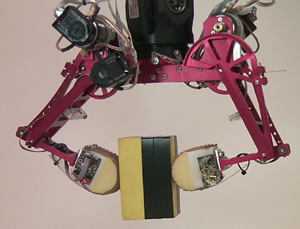 |
 Dexter
is a two-fingered robotic hand, with two degrees of freedom per finger. Each
degree of freedom is powered by a low friction, low inertia DC servomotor. The
motor is connected to the link through a cable/drum drive similar to those found
in haptic feedback devices such as the PHANToM®. As a result, the hand has
low friction and is backdrivable. The robot has four RE035
Maxon motors which are basket wound low inertia motors with rare earth magnets
to provide a max continuous torque of about 80 mN-m. Attached to each motor
is an HP encoder with 500
lines of resolution, giving us 2000 cpr using qudrature. The motors are driven
by four linear current amps (APEX
PA-05) which is in turn controlled by the servo card D/A channels. The servo
card is an 8-axis ISA servo I/O card from Servo
To Go (Model I).
Dexter
is a two-fingered robotic hand, with two degrees of freedom per finger. Each
degree of freedom is powered by a low friction, low inertia DC servomotor. The
motor is connected to the link through a cable/drum drive similar to those found
in haptic feedback devices such as the PHANToM®. As a result, the hand has
low friction and is backdrivable. The robot has four RE035
Maxon motors which are basket wound low inertia motors with rare earth magnets
to provide a max continuous torque of about 80 mN-m. Attached to each motor
is an HP encoder with 500
lines of resolution, giving us 2000 cpr using qudrature. The motors are driven
by four linear current amps (APEX
PA-05) which is in turn controlled by the servo card D/A channels. The servo
card is an 8-axis ISA servo I/O card from Servo
To Go (Model I).
The motors are fairly small, due to weight and space limitations, but are still capable of providing enough force at the fingertips to pick up a 250g object, such as a softball, which more than suffices for the purpose of these experiments. The links are 100 mm long, and each has over 120° of motion. The workspace of the hand is about 400 mm by 150 mm, with a positional resolution of 0.08 mm. This workspace is sized to best manipulate objects from about one to three inches in diameter. Manipulation is not limited to spherical objects; the telemanipulation tasks involve manipulation of square blocks and cylindrical objects.
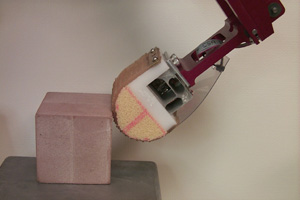 Two-axis
strain gage force sensors have been incorporated into the robot fingertips to
read the forces applied by the robot to the object. The force sensors have good
linearity and are accurate to ± 0.1 N up to 5 N. The fingertips have
an dovetail mounting system so that different tip types can be easily attached
to the robot and investigated.
Two-axis
strain gage force sensors have been incorporated into the robot fingertips to
read the forces applied by the robot to the object. The force sensors have good
linearity and are accurate to ± 0.1 N up to 5 N. The fingertips have
an dovetail mounting system so that different tip types can be easily attached
to the robot and investigated.
 The
robot hand is placed on the end of an Adept
1, a 4 DOF SCARA industrial robot arm. The Adept has a positional resolution
of 0.04 mm and 0.05° in the rotational axis. The workspace is approximately
1100 mm long by 350 mm wide by 175 mm high. The robot trajectory is controlled
by the Adept controller, which requests new commanded positions as needed. The
commands are sent from the computer that is tracking the wrist motion.
The
robot hand is placed on the end of an Adept
1, a 4 DOF SCARA industrial robot arm. The Adept has a positional resolution
of 0.04 mm and 0.05° in the rotational axis. The workspace is approximately
1100 mm long by 350 mm wide by 175 mm high. The robot trajectory is controlled
by the Adept controller, which requests new commanded positions as needed. The
commands are sent from the computer that is tracking the wrist motion.
The robotic hand is controlled using a 1000 Hz servo control loop implemented on a Pentium II computer running the QNX operating system. Details of the control algorithm are covered on the Shared Autonomous Control page.
| |
| |
| |
| |
| |