Application of Potential Fields for Vehicle Control
Implementation of the potential field driver assistance system will take place in the summer of 2002. The testbed is a 1997 Chevrolet Corvette converted to steer-by-wire. The initial application for the potential field controller will be a lanekeeping assist system. The desired trajectory will be created using differential GPS. This work will give important information on drive acceptance and validate the theoretical work on bounding the vehicle's lateral motion.
More Info on the Steer-by-Wire Corvette
The following video shows an experimental run of the potential field
lanekeeping assistance system. During these test runs there is no
steering input from the driver. The file is pretty large (25 MB) so you
will have to be patient.
Potential Field Video (25 MB)
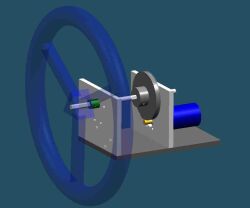
Work has also been done on force feedback to the driver. When the mechanical link to the roadway is removed a separate force feedback system must be designed to give appropriate feedback to the driver. An initial system has been developed in the lab to explore some feedback issues. The current system uses an 80 Watt maxon motor with a 10:1 reduction using a cable drive system. The amplifier is a Logosol LS-5Y-12-DE running in torque control mode. The cable drive provides smooth feel to the user and is back driveable. The cable drive does, however, limit the range of motion and it must have high enough tension to prevent slip. The final system installed in the vehicle may use a different driving mechanism. Currently the wheel is used with hardware in the loop testing to recreate a realistic driving feel and appropriate feedback for the potential field driver assistance system.



Potential Field Home
|