|
|
|
|
|
|
|
|
iSprawl: a fully independent
Sprawl robot that is a bridge to the
new
RiSE project.
|


|
|
|
|
|
|
|
 |
"Sprawlettes"
Batch-fabricated modified Sprawls with embedded circuitboard and air manifold.
Details
|
|
 |
"v Sprawl"
Dynamic simulation of Sprawlita in ADAMS.
Details
|
| |
|
|
|
|
|
|
|

|
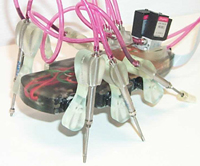
"Sprawley Davidson"
Prototype legs with valves mounted directly above the piston for faster actuator speed. Sprawley has been clocked at roughly 5 body-lengths per second!
Video (5M)
Hi-speed Video (6M)
Close Up
|
|
|
|

|
"Pseudo-sprawls"
Reconfigurable versions of Sprawlita for distribution among different Universities
Close Up
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
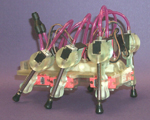
"Sprawlita"
First prototype built with SDM technology. Servos and pistons are embedded in the robot's structure. Clocked at 3 body-lengths per second, Sprawlita can overcome hip-height obstacles.
Description
|
|
Watch Sprawlita in this VIDEO made for Australian Television!
|
|
Watch Sprawlita's Grand Day Out in this VIDEO
|
|
|
|
|
|
|
|
|
|
|
|

|
"Mini-Sprawl"
The first hand-sized dynamic running robot, Mini-sprawl was quickly built with hot glue and tie-wraps.
Description
More videos
|
|

|
"Franken-sprawl"
A salvaged Sprawl was redesigned with high-flowrate valves and flexible SDM leg-hip joints.
Leg description
|
|
|
|
|
|
|
|
|
|

|
"Sprawl"
The first full prototype built at our lab, Sprawl stands as one of the first fully dynamic locomoting hexapods
Description
|
|
|
|
|