
Construction Time: ~2 weeks.
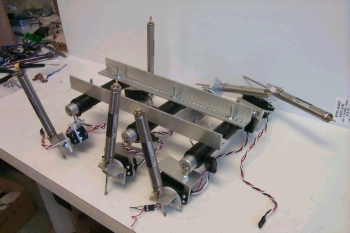
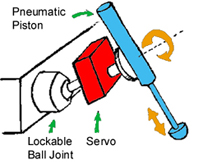
Design: Each leg consists of two
DOF: a prismatic joint (powered by a pneumatic piston) and a rotary joint
(powered by an RC servo motor). Each leg is attached to the platform
by a ball joint, such that the orientation of the leg with respect to the
body can be arbitrarily set and locked into place.
Two small pneumatic 3-way valves per leg regulate air into each side of the piston. Neither position or foot-contact is sensed in this version.
Preliminary Experiments: Rudimentary locomotion has been acheived by simply switching support between sets of legs that form a tripod. The servos which position the legs are used only to maintain the prismatic joint at a certain position. However, due to the inherent compliance built into the RC servo controller, the servos act as passive torsional springs with a constant equlibrium point. That is, we can achieve locomotion with only two degrees freedom (one per tripod) in the entire robot (of course, off-the-shelf toys can do also do this). This locomotion is more of a "stumbling" or "fall-and-recover" gait rather than a purely statically-stable walk or purely dynamic run. As shown in the videos below, the angle of the leg with respect to the body yields different stumbling patterns and forward speeds.
Videos: We recommend Quicktime
to watch these videos.
| .mov file | Description |
| Large
Version (6M)
Compressed Version (1M) |
Stumbling or "marching" in
place. Here all the legs are positioned and held in a nearly
vertical position. Support is switched between the two tripods.
Some turning is observed.
 |
| Large
Version (7M)
Compressed Version (1M) |
Stumbling forward. Here
the rear and middle legs are angled backward, while the front legs are
angled forward, in a manner similar to a cockroach. Again, the only
actuation is in the prismatic joints, where each tripod is alternatively
actuated.
 |
| Large
Version (12M)
Compressed Version (2M) |
Stumbling forward. Here
the angles of the legs are set to more extreme positions. We can
see that the behavior is quite clumsy.
 |
| Large
Version (16M)
Compressed Version (2.6M)
|
Extra footage. While there is only one actuated DOF, there is also compliance at the hip joint. |
| Large Version (6M) Compressed Version (1M) | Extra footage. Here we see the robot maintaining posture on three legs. |
| Large
Version (7M)
Compressed Version (1M) |
Extra footage. Earlier one-legged prototype. |
Notes: While the locomotion achieved is not all that impressive, it is interesting to consider the possibilities. First, we are only using a fraction of the DOF. Second, the "stumbling" demonstrates a pseudo-dynamic walking behavior, not a purely statically-stable walk. In fact, it seems possible to replace the servo motor with a passive torsional spring, and still achieve the same form of locomotion. Therefore, this is some indication that compliance plays a large role in locomotion. Last, it is also interesting that the leg-configuration that resulted in this "stumble" is one similar to the cockroaches, with the rear and middle legs angled backwards and the front legs angled forward.
A possible explanation of the "stumble"
is as follows:
 .....
..... .....
.....
The robot lifts one tripod and stands on the other. Since the load on the stance tripod increased, the deflection of the servo motors increases since they are compliant (due to the proportional control loop). This in turn tilts the body up, while moving somewhat forward.
The other tripod is then set down on the
floor. Since the body is tilted, the new tripod touches down in front
of the old tripod. In addition, as they contact the ground they push
the body, both rectifying it and pushing it forward. The cycle is
then repeated.