

The Haptic Paddle
About the Haptic Paddle - Overview of the Haptic Paddle
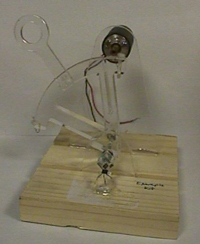
The haptic paddle is a one degree of freedom force-feedback joystick that was developed to illustrate principles in an undergraduate mechanical engineering class (ME161: Dynamic Systems) at Stanford University. The goal was to create a demonstration tool that would be inexpensive, flexible, and fun for the students.Use in a Dynamic Systems Course
A summary of how the haptic paddle was used in the Fall 1996 ME161 course at Stanford is provided in the following paper:- C. Richard, A.M. Okamura, M.R. Cutkosky, "Getting a Feel for Dynamics: using haptic interface kits for teaching dynamics and controls", 1997 ASME IMECE 6th Annual Symposium on Haptic Interfaces, Dallas, TX, Nov. 15-21. (97k pdf)
- Lab 1 - Motor Spin Down Test
- Lab 2 - Bifilar pendulum
- Lab 3 - Equivalent Inertia
- Lab 4 - Motor Constants and Sensor Calibration
- Lab 5 - Feedback control
Hardware
- List of parts in your haptic kit
- Parts, vendors, and prices used in the construction of the kits for the Fall 1998
- Intructions for assembling your haptic paddle
- Diagram and parts for amplifier circuit
Software
A simple control program was was developed to allow the students to calibrate the sensor and change the apparent stiffness and damping of the device. Several "haptic games" were also developed for the students to enjoy at the end of the course. The source code (in C and C++) is provided below. Please note that this source code is provided only as an example; there is no support provided and it is not guaranteed to be robust! The code was written using Borland C++ for the PC and assumes A/D and D/A Boards from Computer Boards, Inc., the CIO-DAS1600 and the CIO-DDA06 (we are not necessarily recommending these boards).- Code for lab 1 (spin-down test): lab1.zip
- Version without games: paddle1.zip
- Version with games: paddle2.zip - Warning, crashes often!
- Matlab scripts for analyzing data: matlab.zip
Acknowledgements
Many people have contributed to the development and success of the haptic paddle. The idea was originated and the principal design done by Dr. Mark Cutkosky. Jesse Dorogusker did most of the original design and protoyping. Christopher Richard, the TA for ME161 in 1996, put together the kits for the first use in a classroom and designed the amplifier and parts of the control software. Allison Okamura contributed to the software development and assisted with ME161 that quarter. The design was later refined by Bart Nielson, David Hsu, and Brad Levin as independent research projects with Dr. Cutkosky. The design was refined again and distributed to ME161 students and instructors at other universities by Allison Okamura (co-instructor for ME161 in 1998) and Weston Griffin (TA for ME161 in 1998). Paul Mitiguy was the other co-instructor in 1998.Allison Okamura - aokamura@jhu.edu
© 1998
![]()
![]()
![]()
![]()