|
|
 |

|
|
Handwheel Force Feedback for Steer by Wire Vehicles
People
- Joshua P. Switkes
- Ian A. Coe
Sponsors
The National Science Foundation
Description
With the removal of a mechanical connection between handwheel and road wheels, steer by wire vehicles require artificial force feedback to provide the driver with adequate information about road wheel and vehicle states. This work is currently examining two aspects of this need.
Stability of Force Feedback Combined with Lanekeeping Assistance
While both lanekeeping and handwheel
force feedback have been studied independently, the combination
has not been analyzed before. This coupling of the force feedback
and assistance systems can destabilize the vehicle if not designed
properly. Linear modelling verified by experiments shows that for
stability it is important for the handwheel to have sufficient
inertia and damping and also to choose appropriate parameters for
the lanekeeping assistance system.
Title:Handwheel Force Feedback for Lanekeeping Assistance: Combined Dynamics and Stability
Authors: Joshua P. Switkes, Eric J. Rossetter, Ian A. Coe, J. Christian Gerdes
In the proceedings of the 2004 International Symposium on Advanced Vehicle Control; August 2004.

Steer by Wire Test Vehicle with Force Feedback System
Sensor Fusion for Force Feedback
This work explores the possibility of combining solid state
accelerometers with a low resolution position sensor to provide
clean estimates of handwheel position, velocity and acceleration,
for use in force feedback. Typically determining the acceleration
and velocity of the handwheel requires differentiating a position
sensor such as an encoder or potentiometer. Unless expensive
high-resolution sensors are used, this differentiation leads to a
noisy signal, requiring significant filtering which leads to
significant phase lag. With a direct measurement of acceleration,
we circumvent many of the problems associated with differentiation
and filtering. This work uses an in-vehicle experimental setup
combining MEMS accelerometers with a low-resolution potentiometer
using a Kalman filter. Initial experimental results show the setup
can provide smooth acceleration and velocity signals in a moving
vehicle.
Title:Using MEMS Accelerometers to Improve
Automobile Handwheel State Estimation for Force Feedback
Authors: Joshua P. Switkes, Ian A. Coe, J. Christian Gerdes
In the proceedings of the 2004 ASME IMECE; November 2004.
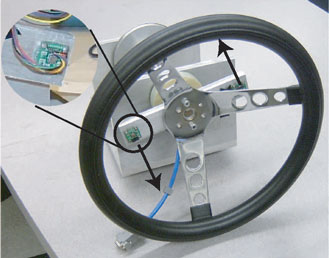
Experimental Setup on Laboratory Steering Wheel
|
|