Theoretical Results in Potential Field Control
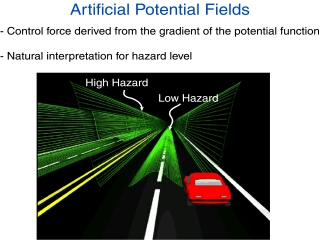
The potential field
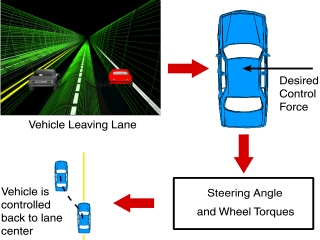
approach is perfect for integrating collision avoidance into driver assistance systems. The idea is to create artificial fields where the height represents the level of hazard on the roadway. Large potentials represent extreme hazards whereas low or zero potentials represent safe regions on the road. A desired control force proportional to the gradient of the potential function is applied to the vehicle through a combination of differential and steering. These control inputs are added on top of the driver commands to help avoid collisions with dangerous obstacles. Since this system is designed to aid the driver, it does not cancel or alter the underlying handling characteristics of the vehicle.
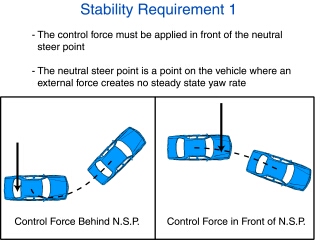
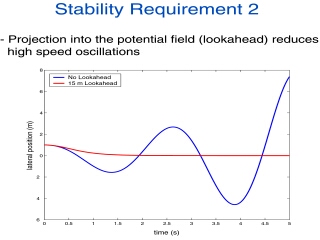
Research has been focused on two main factors. The first is stability of the system without driver inputs. This work showed the importance of the control force location and the need for lookahead or projection into the potential (see slides below). For a detailed stability analysis please read the following paper:
Linear Stability Paper
The other main research area focuses on bounding the lateral motion of the vehicle. This work uses Lyapunov theory to create a bounding function consisting of the lateral and yaw motions of the vehicle. Using this bounding function it is possible to scale the potential function to guarantee collision avoidance of a fixed lateral obstacle. The following talk gives a good overview of this approach.
Slides on Bounding Lateral Motion
Below are slides summarizing the potential field approach and showing some important stability results. For a larger view click on the slide.
Potential Field Home
|