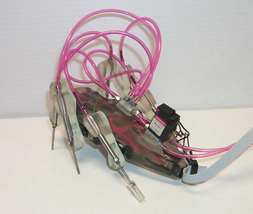
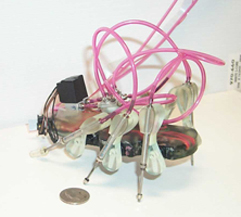
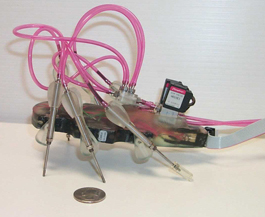
Purpose: Sprawlita is a Shape Deposition Manufactured platform with six legs of 2 (actuated) DOF each. Based on the Sprawl 1.0 and Mini-Sprawl prototypes, it is a platform to test ideas about locomotion schemes, leg design and leg arrangement and to build compliant leg structures using SDM. The size is the same scale as Mini-Sprawl, with slightly more mass (270g vs. 250g) and less stiff compliant hip joints with only one (intended) degree of freedom.
Design, Manufacture, and Assembly Time: ~2 weeks. The same circuitry and code as in Sprawl 1.0 were used.
Design: Each leg consists of two DOF: a prismatic joint (powered by a pneumatic piston), a rotary joint (powered by an RC servo motor), and a passively compliant hip joint (SDM test specimens - layer 1 of SDM legs). This new passive hip joint design provides more compliance about the rotary axis of the servo, but is very stiff along the other axes. Each piston has a spring return. Like Mini-Sprawl and unlike Sprawl 1.0, only two two-way valves are used here. Each valve pressurizes the three pistons in one tripod of support. The feet for this version are simply lengths of nylon tubing.
Control: Like Sprawl 1.0 and Mini-Sprawl, there is very little control involved in the locomotion. The servos (and therefore the leg angles) are commanded to and held at a certain angle. The pistons in one tripod of support are simultaneously activated and deactivated. Both tripods are alternatively activated and deactivated, with a certain duty cycle (a 55% duty cycle means both tripods are activated 10% of the cycle period). All whole-body motion results from this activation-deactivation and from the compliance at the hips.
Preliminary Experiments: Experiments with Sprawlita have shown that the increased hip compliance has resulted in locomotion that is not only faster than Mini-Sprawl, but is also lacks an obvious aerial phase, much like the cockroach locomotion used for inspiration.
The videos shown next used a supply pressure of 100psi, a tripod duty-cycle of 35% and a cycle period of 200ms (5 Hz).
Videos: We recommend Quicktime
to watch these videos. For a quick view, download the smaller (lower
resolution) versions. Your processor may have trouble playing the
larger versions.
| .mov file | Description |
| 320x240 Version (27M)
160x120 Version (12M) |
2.5 Body lengths per second
on a treadmill, including perturbations. Rough Terrain obstacle traversal.
|
| 320x240 Version (15M)
160x120 Version (5M) |
Close up of Running
(~35cm/s). |
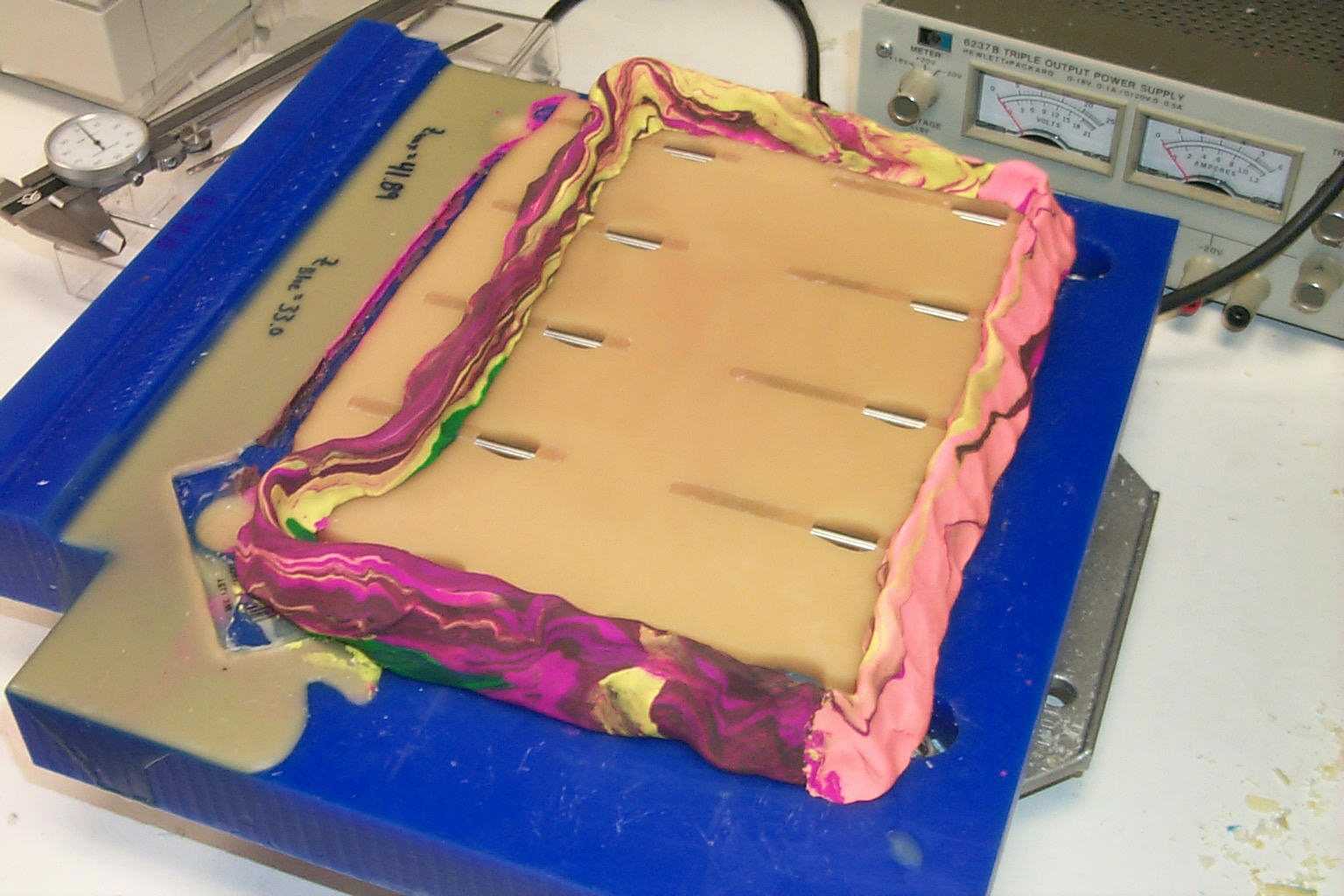
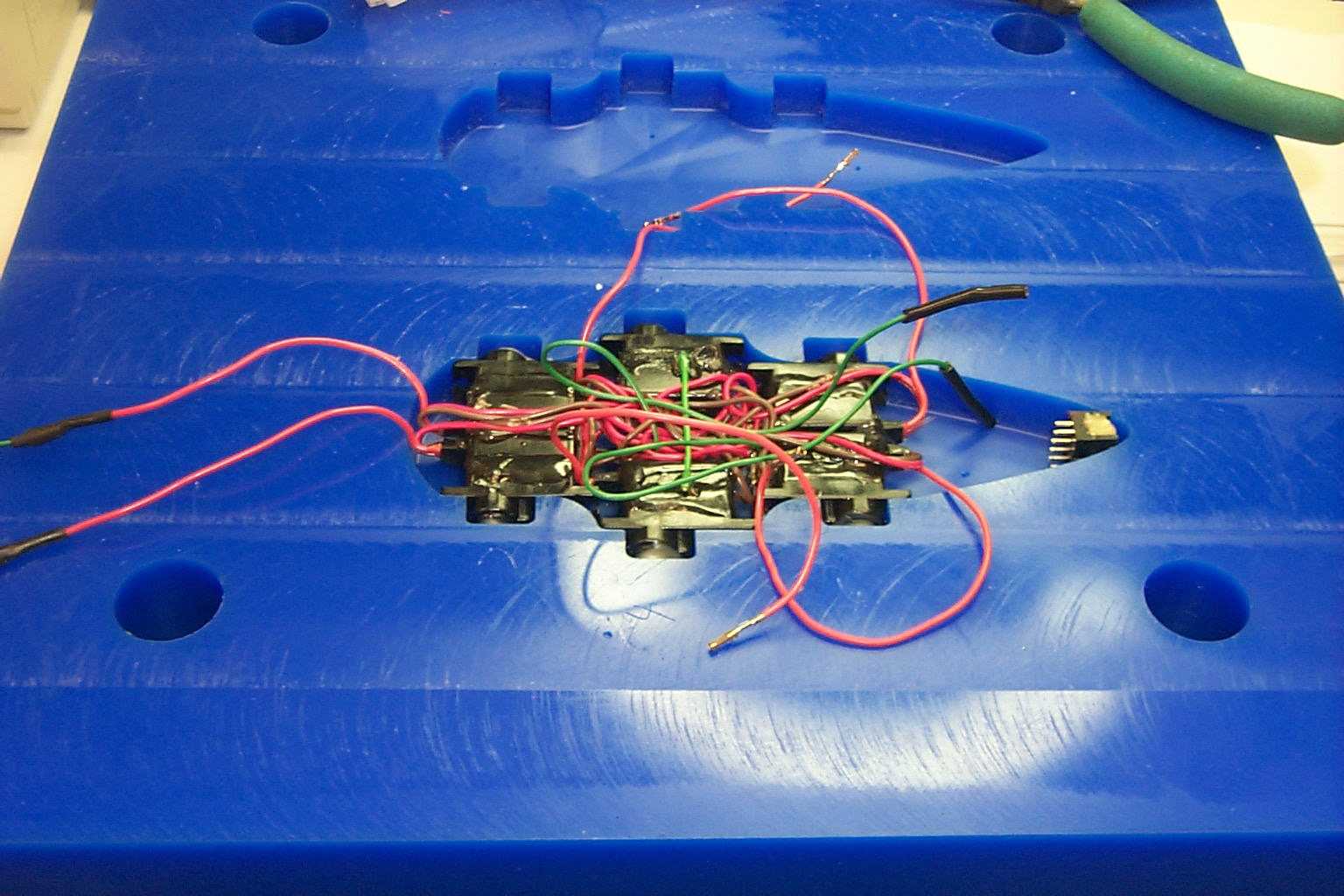
Shape Deposition Manufacturing: The big difference between this design and Mini-Sprawl (besides the slight hip modification) is the unique method of manufacture - SDM. The entire body is one piece: servos and wiring are embedded in the plastic of the body. More impressively, the legs are one piece: the servo attachment, compliant hip joint, and piston are all embedded in the same plastic leg "unit".
Body SDM Process

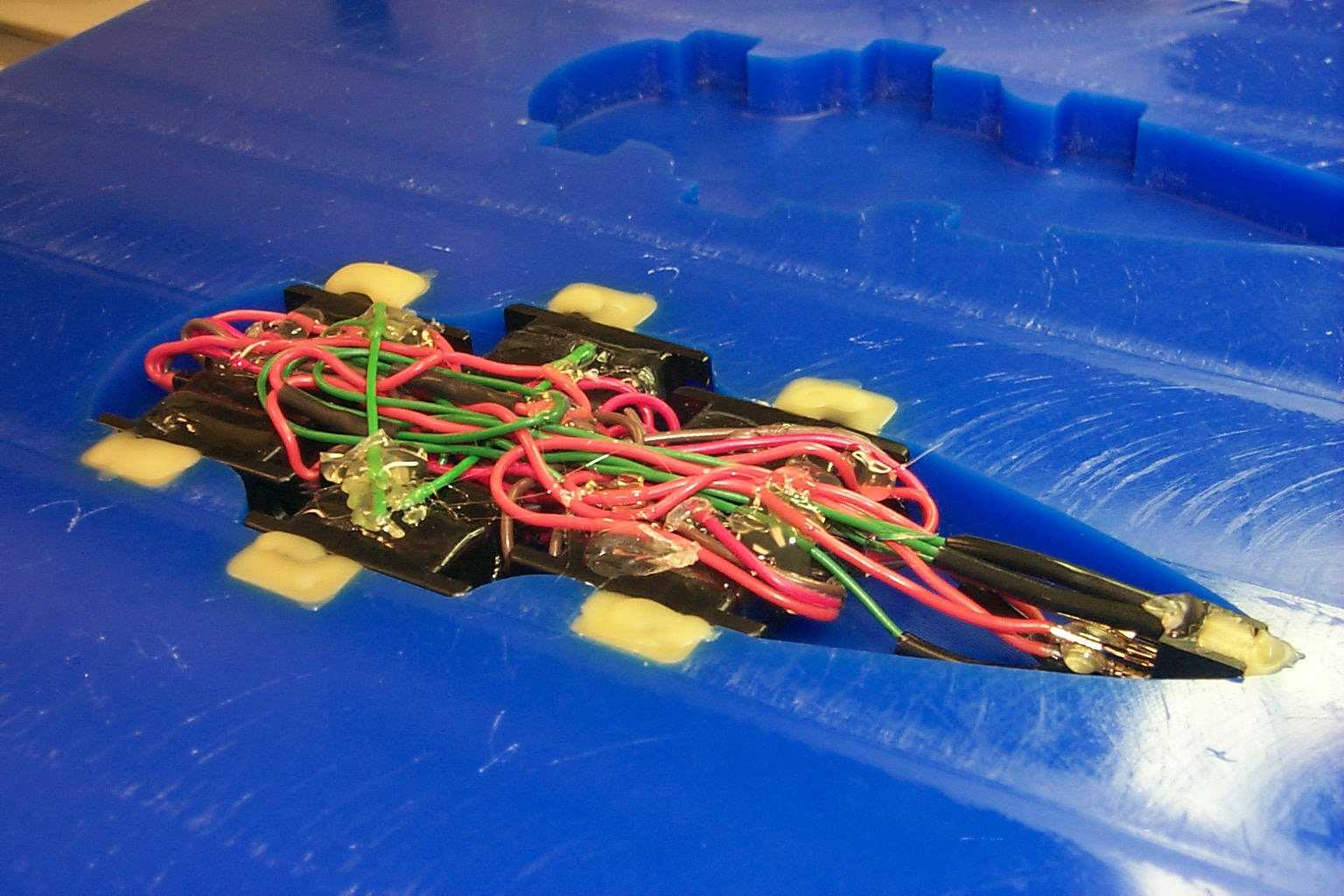

Leg SDM Process


Click here for a directory of more in-process pictures (in no real order).
{kind=link}
{kind=link}