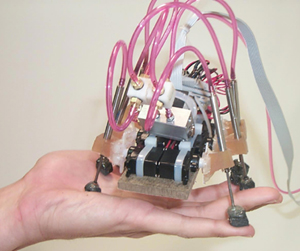
Purpose: Mini-Sprawl, versions 0.1 and 0.2, is a prototype platform with six legs of 2 (actuated) DOF each. Like Sprawl 1.0, it is a platform to test ideas about locomotion schemes, leg design and leg arrangement and to identify areas that can be improved by SDM. This smaller version of the same basic design is also meant to give us insight into scaling issues and intuition about our target robot size range.
Assembly Time: ~2 days. The same circuitry and code as in Sprawl 1.0 were used.
Design: Each leg consists of two DOF: a prismatic joint (powered by a pneumatic piston) and a rotary joint (powered by an RC servo motor). Each piston has a spring return. Unlike Sprawl 1.0, only two two-way valves are used here. Each valve pressurizes the three pistons in one tripod of support. The ends of the pistons are padded with "spongy" feet.

In Version 0.1, the pistons were rigidly attached to the servo motors. Version 0.2 uses a compliant coupling between the servo and the pistons. The coupling is an angled block of a rubber-like polymer, which provides large compliance about the rotary axis of the servo, medium compliance perpendicularly to this axis and low compliance into this axis.
Control: Like Sprawl 1.0, there is very little control involved in the locomotion. The servos (and therefore the leg angles) are commanded to and held at a certain angle. The pistons in one tripod of support are simultaneously activated and deactivated. Both tripods are alternatively activated and deactivated, with a certain duty cycle (a 55% duty cycle means both tripods are activated 10% of the cycle period). All whole-body motion results from this activation-deactivation and from the compliance at the hips.
Preliminary Experiments: Experiments with Version 0.1 (rigid hip joints) clearly showed that hip compliance plays a crucial role in achieving locomotion with this control scheme. The rigid hips only resulted in the platform jumping or marching in place, regardless of the angles on the legs.
With Version 0.2, a dynamic form of locomotion that is not statically stable can be achieved with the legs positioned in the following configuration:
The videos shown next used a supply pressure of 100psi, a tripod duty-cycle of 35% and a cycle period of 300ms.
Videos: We recommend Quicktime
to watch these videos. For a quick view, download the smaller (lower
resolution) versions. Your processor may have trouble playing the
larger versions.
| .mov file | Description |
| 640x480
Version (11.3M)
160x120 Version (2.5M) |
Side View. |
| 640x480
Version (15.3M)
160x120 Version (3.1M) |
Front View. |
| 640x480
Version (4.2M)
160x120 Version (1M) |
Top View. |
| 640x480
Version (12M)
160x120 Version (2.5M)
|
Compliance in Legs. |
Observations: