Documentation regarding the
modeling of Biomimetic Robots
Sean Bailey 07/24/2000
Fast and Robust Legged Locomotion (5/12/2000)
"Robust Dynamic Locomotion Through Feedforward-Preflex Interaction" (2/2000) (PDF Format)
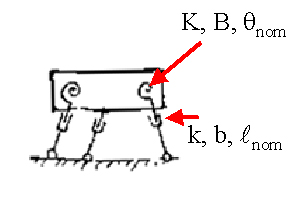
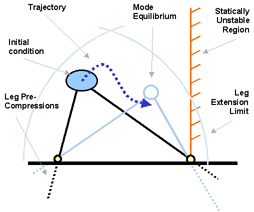
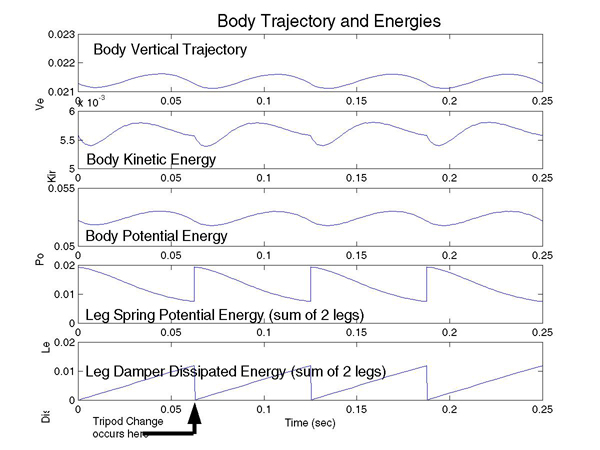
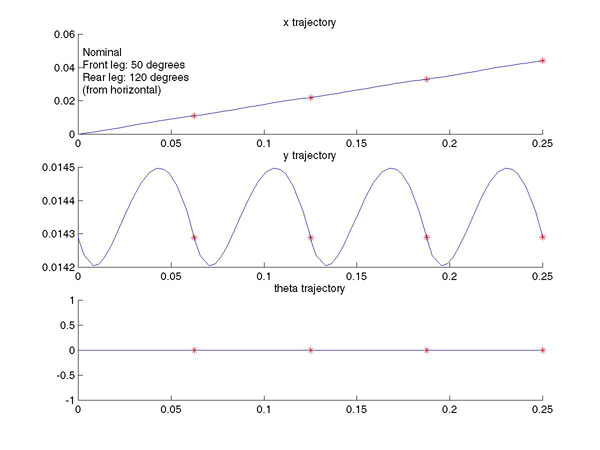
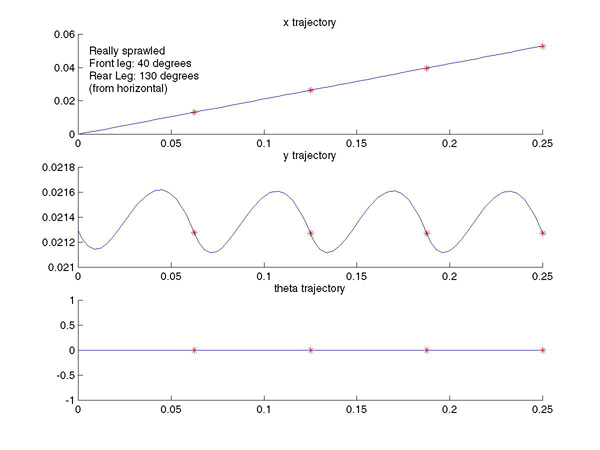
What is the shape of the body trajectory, and where are the tripods switched?
Plot of answer
For reference, a plot of how the legs are placed (with a body trajectory).
Is this different than what you were talking about with your roach
measurements? The body is closer to it's lowest point in it's vertical
trajectory at the tripod switch, rather than the highest point. This
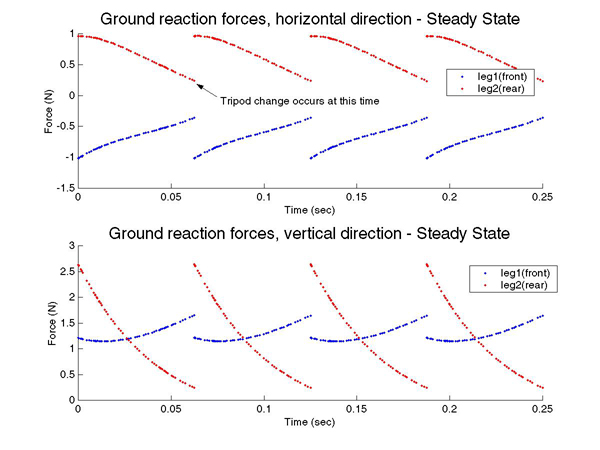
seems to not fit the bouncing monopod model very well.What are the ground reaction forces?
Plot of answer
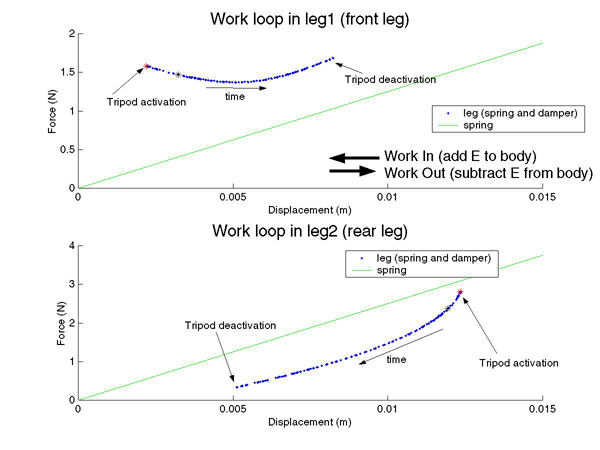
As expected, the front legs decelerate and the back legs accelerate.What is the energy storage and return?
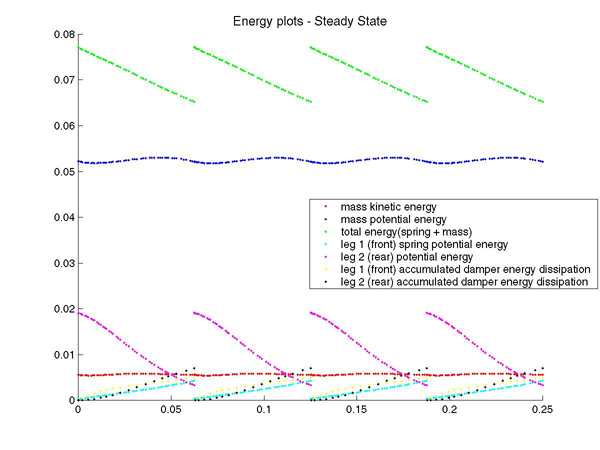
Plot of answer
It seems like the kinetic and potential energy are only slightly out of phase.
Also, note that at the beginning of each tripod, energy is added to the system by introducing compressed springs. At the end of the tripod, energy is taken away from the system by removing compressed springs. And, during the tripod, energy is dissipated due to the dampers in the legs. As the system is at steady state, the sum of these three is constant at the tripod switching points.
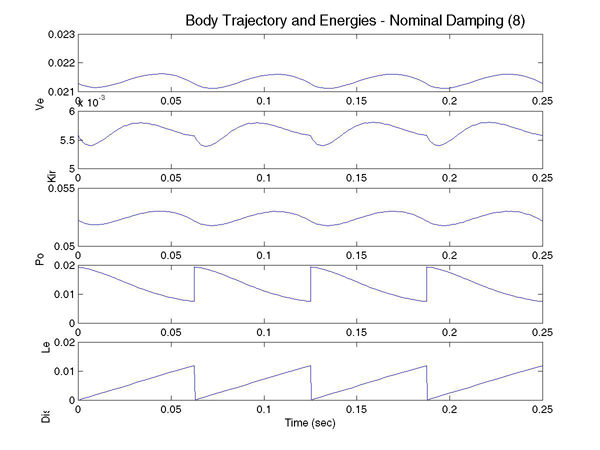
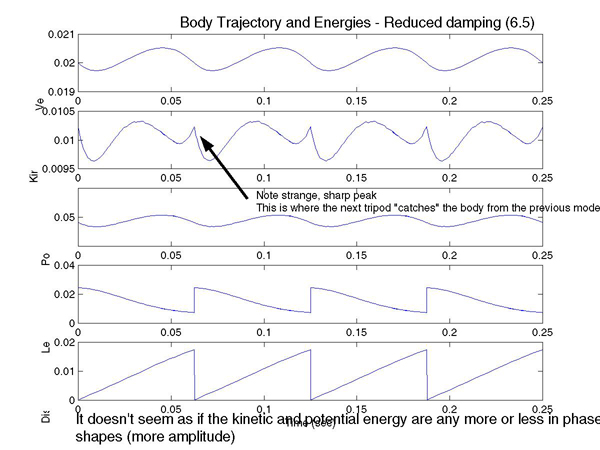
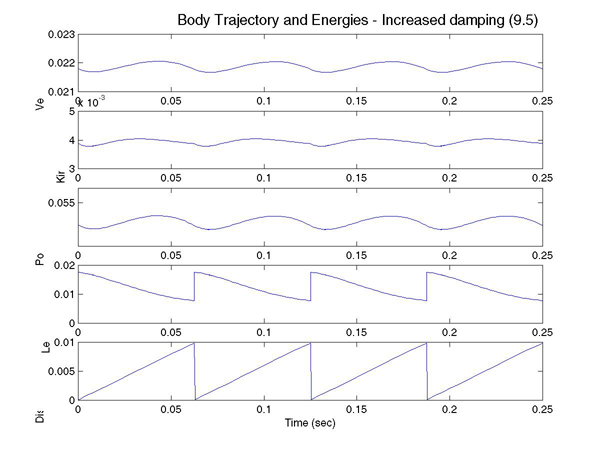
And, changing the amount of damping changes the shape of the energy curves, but the relative phase seems about the same (nominal damping) (less damping) (more damping)Also:
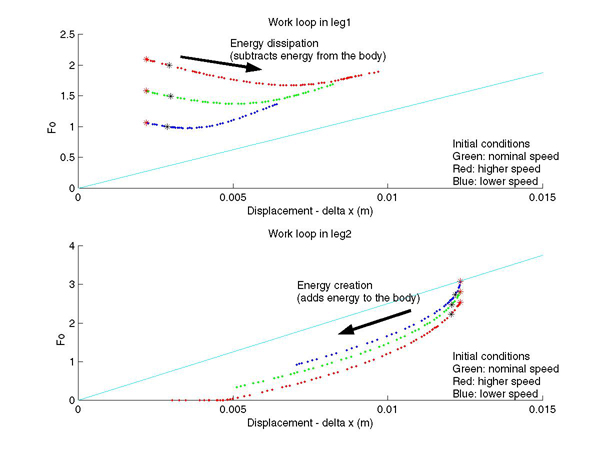
Leg force workloops (remember, extension is work out)
All the energies plotted (not very useful)Does the sprawl angle change where on the vertical trajectory the tripod switching point occurs?
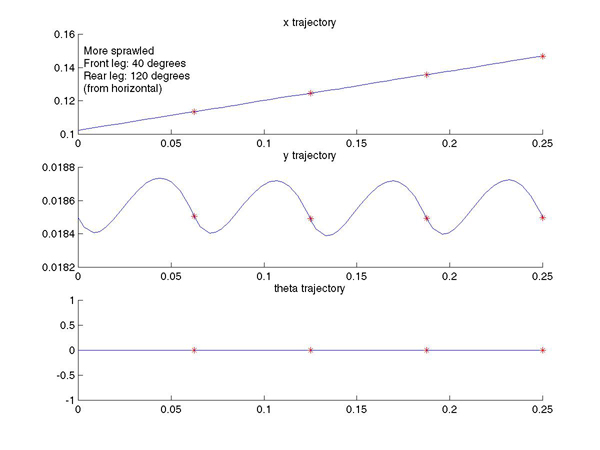
Plots of answer (nominal)(more sprawled)(really sprawled)
It doesn't seem to affect the tripod switching point at all. I even changed the timing (stride period) and that did not seem to affect the switching point either.Can we "prove" that this is stable by showing that energy level of the system is automatically controlled by the system dynamics?
Plot of answer
The amount of energy is automatically compensated for by the system dynamics. If there is excess speed (and therefore excess energy), there is less energy addition, and more energy dissipation. If there is less than the nominal speed, then there is more energy addition, and less energy subtraction.Can you quantify the total energy / kg for one stride? How much of that energy (what %) is stored and returned during one stride?
Plot of answer
There are many different possible answers for this question. For the worst case, we assume that the amount of energy used by the system per stride is equal to the amount of energy added to the system by the addition of compressed springs at the beginning of each mode (tripod). Thus, all the energy dissipated by the dampers is lost (naturally) and the energy removed from the system by the removal of the compressed springs at the end of the mode is "lost" (less obvious). Thus, the energy / kg per stride is (.25 kg body):
0.08 J/kg
If we consider the energy removed at the end of each by the removal of compressed springs to be "recovered", then the energy / kg per stride is (.25 kg body):
0.04 J/kgDamping vs. mode switching:
Plot of answer (excess energy dissipation) (deficient energy addition)Does having 3 legs per tripod change things?
When there is excess or deficient energy in the body due to a perturbation, does the damping effect account for all the energy loss/addition?
Yes. In fact, when there is excess energy, the springs actually add energy to the system rather than help dissipate it. Likewise, when there is deficient energy, the spring switching actually removes more energy from the system. Thus, the dampers account for the energy regulation.
As a hypothesis, we think that this is a result of the tripod switching being near the low point of the vertical trajectory. Roughly speaking, with excess speed, the body travels too far along the trajectory, thus causing it to be lower than it would be otherwise. And, when the next set of legs appears, since the obdy is closer to the ground, the amount of energy added to the system is more than would be in steady state. The plots below which compare excess and deficient energy body trajectories and leg plots to the steady state support this hypothesis:
(excess energy) (deficient energy)
Is the fundamental mechanism of stability the damper or the mode switching/compressed spring effect?
Appears to be the dampers. While the spring switching effect is interesting, but does not appear to help with the energy regulation.
The third leg in the tripod appears to offer additional freedom in specifying the leg properties. Using this extra degree of freedom, we were able to shift the location of the tripod switching point to a rising edge by changing the angle of middle leg (so it was more horizontal):
(Plot of middle leg at 72.5 degrees from horizontal) (Plot of middle leg at 70 degrees from horizontal)
Also, as we change the timing, the switching point also changes. With the middle leg at 70 degrees, as we increase the stride period length from .125s to .2s, the switching point moves to the falling edge.
(Plot of the .125s period) (Plot of the .2s period)
Still exploring this area...
Does the leg extension time change behavior?Does a more stable system mean that it is inherently less energy efficient?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}