Planning by Model Checking
Deep magic, but basic ideas
Encode state transitions as
Ordered Binary Decision Diagrams
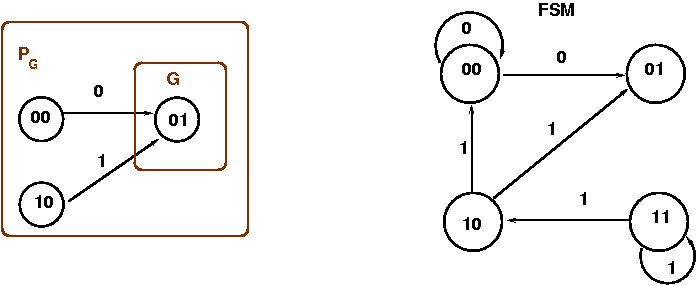
Given planning domain
Σ= (S, A, ϒ)
where nodeterministic
ϒ: S x A → 2
S
Generate sets of plans
{π ={(s,a)} | s ∈ S, a ∈ A(s), ∀ s, ∃! (s,a) ∈ π}
Take goal
Ψ
and model check for paths to goal.
Action 0: Pre:
∼X
1
∧ ∼X
2
, Effect:
∼X
1
Action 1: Pre:
X
1
, Effect:
(X
1
∧ ∼ X
2
→ ∼X
1
) ∧ (X
1
∧ X
2
→ X
1
)
Recomend:
Planning as model checking, OBDDs
by José Luis Ambite
Web Service Composition as AI Planning - a Survey
by Joachim Peer
©2012
Charles Petrie
- permission to reproduce widely with attribution.