Slide 14 of 50
Notes:
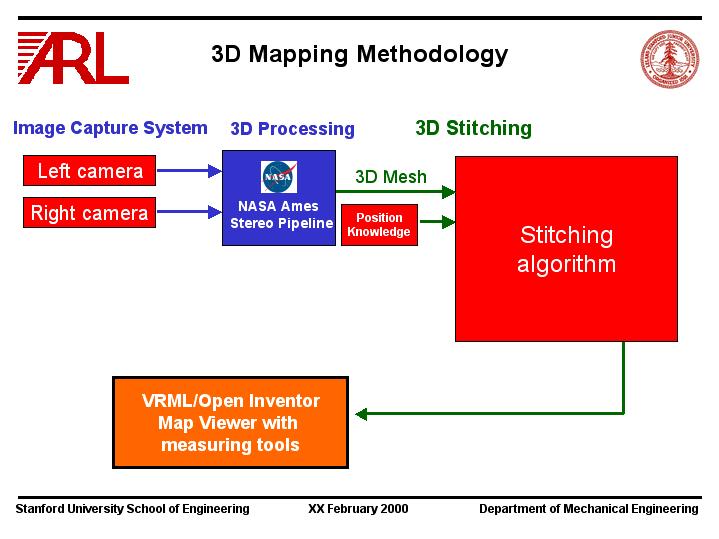
- 1 vs. 2 cameras (current limits in internal position knowledge)
- Doppler based navigation (1cm)
- 2 cameras gets you down to machining errors mils (will show why this important in geometrical derivation next)
- Individual Camera Calibration
- Model development from calibration process
- Calculated intrinsic and extrinsic parameters fed into stereo? pipeline for mesh building.
- Distortion free images (de-warped) (done)
- Stereo Pipeline
- Develop calibration process to characterize errors based on mesh-building algorithm.
- Laser assist?
- Calibration process would also allow for using other “pipelines”
- Mapping/mesh-stitching
- Calibrate system (ROV) wide errors using navigation data and correcting using mesh stitching algorithms.