|
Mark R. Cutkosky
Center for Design Research
Dept. of Mechanical Engineering
Stanford University |
Links
in the List of Topics will take the reader to appropriate sections in the
document.
Use the "Go Back" command in your browser to return to the previous location. Links [in square brackets] will load images. |
- at University of Tokyo (Kaneko and Kasagi, Hatamura, Sasaki)
- at TMIT (facilities, Fukuda, Toyota)
- at Tokyo Institute of Technology (Hirose)
- future plans (TMIT, Toyota, short courses, AIM)
Shimoyama (shape memory alloy micro grippers, micro helicopter, MEMs robots) Sasaki (Tactile sensing, dexterous manipulation, mechatronics education) Fukuda lab and Dept. of Production and Information Systems Engineering Hatamura (Precision manufacturing, nano-fabrication, machine controls, design, engineering design education) S. Hirose (walking robots, engineering design education) H. Kimura (neural control, walking robots) |
3-19 N. Iwatsuki and Toyland 2000.
3-22 TMIT Ikei vibration feedback3-24 Toyota Noda, Toda (Research presentation and discussion)3-26 Okayama Okubo (Human interaction robots, avatars for
T. Yoshikawa (haptics, telemanipulation, control)
3-29 TMIT Workshop on Global Project-Based Learning Cutkosky (Global Project Based Learning Developments)3-30 TMIT Informal working session on future collaborative research |
There was an interesting comment from Shimoyama that didn't see much MEMS activity at Stanford (as compared to Berkeley, for example). However, he does not closely follow the ASME or Applied Physics MEMS conferences and was not aware of T. Kenny's work.
Other projects included a micro-helicopter and various MEMs devices. The micro-helicopter continues to employ a powerful external magnetic field to supply power to on-board magnets.
I next met with Dr. Tetsuro Ogi of the Intelligent Modeling Laboratory, MVL Research Center. This is a well funded lab with lots of industrial equipment. There are many thousands of dollars of Silicon Graphics computers, state of the art high-bandwidth transmission, etc. The "cabin" was amazing. It is a bit like a "cave" system with 3D goggles, but very detailed and very fast. The three walls, floor and ceiling all have rear projection systems. A Polhemus tracker on the goggles tracks the user's motions and gaze direction. Graphic update is virtually instantaneous, far better than a system I tried a year or two ago at NASA Ames. Flying through the Silicon Graphics simulated town gives a slightly dizzy feeling. One expects to feel inertial forces, but of course there are none. We also saw a virtual 3D model displayed in space (a Flintstone's car) and a real-time video image of a person superimposed into the graphic scene. Touching the car and feeling nothing was almost disconcerting - more so than previous 3D models I've seen because it was so realistic. This could be a good application of haptic feedback.
There are plans underway to do remote high-bandidth virtual reality experiments and demonstrations using their network. This last demonstration was a bit disconcerting as only the front surface of the person was captured and displayed, giving the impression of a hollow shell of a person. Still, it is interesting to see what the future of teleconferencing might look like. As I discussed later with Prof. Mats Hanson of the Royal Swedish Institute of Technology, some technology will be needed so that people can explore the environment, culture and organization of groups that they are collaborating with.
Later in the day, I met with Profs. Shigehiko Kaneko and Nobuhide Kasagi of the Mechanical Engineering Dept. and gave a presentation on "project-based learning." The M.E. department at U. Tokyo has evidently not done ME113 or ME310-style project based courses before. They would like to start, but are not sure how to get started. They don't have the circle of industrial contacts or alumni that make it so much easier at Stanford. There were several people from the M.E. Dept. at the presentation. Good questions were asked - ones that don't have an easy answer. I must admit that if I were suddenly transported to U. Tokyo it would be a challenge for me to initiate an ME113 or ME310 -style course. Getting the appropriate industry contacts and industry sponsorship would be critical. A good resource should be to keep track of alumni of the department who have been in industry for a few years. With any luck, they should be at the right level by then to sponsor small student projects (at least, they would be in an American high technology company). Doing the other kind of project-based course (instructor-generated project; everybody does the same one as in ME218, IDMM, etc.) would of course be easier. The only challenge there is getting adequate instructional and prototyping support.
Finished the day with dinner in Shinjuku with Prof. Fukuda's son, Kota (a student at Yokohama National University) and Hideyoshi Yanagisawa, a student at TMIT, talking about the Japanese engineering education from the students' point of view.
Prof. Sasaki has perfected the stress-rate
tactile sensor that we worked on with him a few years ago. He showed some
videos of his [dexterous robot fingers with
stress-rate sensing] exhibiting excellent control of sliding manipulation
(e.g., slowly allowing a grasped card to slip downwards in small, controlled
increments). A [new device allows tele-grasping]
(input of human grasp force, with feedback of incipient slippage).
He also showed some dynamic simulations of manipulation with controlled
rolling and sliding. Sasaki's fingers are controlled with disk drive head
actuators, working through cables. He concludes that the n+1 actuators
(Mason and Salisbury 1985) concept is not ideal
for precise force control.
Sasaki also showed some of the projects he has been using in his course of electromechanical systems and control. He showed an inverted pendulum cart that he developed as an example for a student project. It turned out that this was too difficult for the students to complete in time, so he modified the project to give more latitude to the students. Some built a vehicle that could track a dark stripe along the ground using LED emitter/detector pairs.
Arai's Ph.D. students showed me
some of the recent projects going on in his laboratory. Examples include
cooperating mobile robots that can carry large components. The robots do
not communicate directly, but have enough compliance that they can accommodate
each others' actions transmitted through the common piece.
[Natsuki Miyata, Mitsuhiro Hara, and Ken Sasaki
in Arai's lab with cooperating robots]
I also had a brief conversation with Prof. Fumihiko Kimura at the University of Tokyo. We talked primarily about his continuing work on life-cycle design. The basic idea is to design in features that will allow the life of the product to be monitored and controlled such that its future recyclability, or suitability for refurbishment and reconditioning, is optimized. The research is similar to some of the work done in Prof. Kos Ishii's MML laboratory at Stanford. Kimura and Ishii continue to be in regular contact.
During the afternoon I went to TMIT to tour the laboratories and facilities. Talked at some length with Vlaho Khostov, Konishi Fumikazu and Akinobu Fukazaki and toured the facilities for videotaping and distance education. It was the end of the quarter and few other students were around. We talked about the possibility of me taping (for transmission) my startup lecture for ME310 for the Spring Quarter.
I think Hatamura would find that his approach and philosophy to micro-scale precision manufacturing is similar to that of Prof. Dan Debra at Stanford or Alex Slocum at MIT. He also mentioned that he knows Prof. Fritz Prinz at Stanford and participated in Fritz's workshop in Bavaria a few years ago. The fabrication of micro-systems (mixed thermal, mechanical, electronic...) might be a fruitful area for collaboration with CDR and the Rapid Prototyping Laboratory (RPL). I think a student from either of these labs could spend a productive summer in Hatamura's lab.
Prof. Mitsuishi
showed some of the work
on tele-manufacturing that he has been doing in collaboration with
George Washington University and elsewhere. some of the earlier work was
reminiscent of Paul Wright's Cybercut system and demonstrations at U.C.
Berkeley. More recent work involved a combination of haptic and visual
feedback for providing people with a feel for micro or nanofabrication.
This strikes me as a more compelling example than large scale CNC milling.
The telemanufacturing research could be the only way to provide people
with some intuition about how processes work at such a scale.
I also had some discussion with Hatamura
and Associate Professors Masauki Nakao and Tamotsu Murakami about design
methodology and design education. This was most interesting. Their philosophy
was, I think, about as close in spirit to that of the Stanford Design Division
as any I've found. Hatamura showed me some of his textbooks on design.
These were interesting, and reminded me a bit of the books by Pahl and
Beitz (German school of design), with bits of material also reminiscent
of books by Dave Ullman, and Eppinger and Seering. I was surprised that
he was not apparently aware of the Pahl and Beitz text. I think he'd also
like the book by Ashby (Cambridge University) on materials in design that
Fritz Prinz uses for his course at Stanford.
Prof. Hatamura also showed me the Stirling cycle engine projects that teams of four students work on. He explained that the design problem is left open ended. However, it seems that some standard kit of parts may be available -- either that or the teams learn a lot from each other because a number of very similar designs, with common elements, were in evidence.
The conversation became sufficiently engrossing that we all went out
to dinner near the university for continued philosophical discussions about
design. At this time I learned that Motohide ("Moto") Hatanaka, now working
in my laboratory, had been considered one of their best students.
[Back to top of page]
Afterward, I had a chance to talk with Hirose
in his office. We talked about the fact that Wendy Cheng will be coming
to his lab for a while this summer and about design courses. He prefers
not to try to plan too much in advance but to decide when she comes what
the best project would be, depending on what is going on at the time.
He was interested in the possibility of future collaboration in design
courses and asked for more details about ME310.
Prof. Hirose has become well-known for his "Street Artist Robot" competition
organized over the last several years. A few years ago I participated via
satellite T.V. from Stanford as a remote judge. This contest is similar
in spirit to the project contests we run at Stanford. It is essentially
non-competitive (unlike robot soccer, for example) and emphasizes creativity.
I offered to send Hirose a copy of the ME310 CDROM. He was interested to
learn that Toyota had supported a joint TMIT/Stanford project in ME310.
We agreed to talk more about possible collaborations and project-based
learning when he visits Stanford in late April, for the ICRA 2000 conference.
Prof. Ikei also showed some work with Phantom feedback devices for remote virtual reality display. One of the projects involved some work with XML toward establishing a device class library in Java that will allow different effects to be displayed on demand by different feedback devices (Phantom, Immersion Impulse Engine, etc.).
Later in the day I spoke with Prof. Fukuda about future PBL plans. His view is that Toyota is interested in promoting "creative" engineering design curricula in Japan. They are less directly motivated by a desire to hire alumni of the projects than American project sponsors (but presumably this is also desirable). Like Fukuda, they would like to see increased collaboration generally between American and Japanese universities. And they, and other Japanese companies, would like to see the establishment of some short courses in creative engineering design that their employees could attend. (This interest is not unlike the motivation behind Samsung's decision to send two designers to Stanford to participate in ME310a last year.)
The impression I'm getting is that there is rather more demand for short courses in creative engineering design teams than Stanford can easily accommodate. We need to find a way to to propagate the model so that others can start disseminating it. One possibility is to hold an inaugural short course that includes the essential elements of ME310a and perhaps Bernie and Rolfe's workshop on Teaching Creative Engineering Design. Then alumni of this course could disseminate it to various sites with only moderate supervision from Stanford. We need to decide if this is something we want to embark on and, if so, how much resources will be required. One possibility is that putting together a model for conducting and dissemating such a course, with extensive computer and remote interaction, is something that the Stanford Learning Lab (SLL) would like to get involved in. I should discuss this with Prof. Larry Leifer and understand whether this concept of being able to "export" the Stanford Design Division approach to design education is something within the SLL mission.
Other options and issues to consider:
I had been expecting to talk about global project-based education and perhaps general corporate relations between Toyota and Stanford (CDR and the Alliance for Innovative Manufacturing). Instead, Director Naoki Noda had seen my home page and was hoping that I would talk about my research on haptics, dexterous telemanipulation and biomimetic robotics. Fortunately, this was discussed while I was riding in the car with Mr. Toda, and he was able to call an associate on his cell phone to download some presentation materials from my Biomimetics web site. By the time I arrived at Toyota, a Powerpoint presentation was ready to go.
Director Noda was interested in Shape Deposition Manufacturing and wanted to think about applications that would be relevant to the automotive industry. Many of the systems used in automobiles are large for SDM, but they were quite interested to learn about Honda's fuel cell project with Fritz Prinz. We talked a bit about other potential applications in the products (e.g. ABS systems, fuel systems, in-car human/computer interface systems) and in manufacturing (e.g. injection molding or die casting tooling, as in the projects Fritz Prinz had with GM/Saturn and ALCOA).
Later I talked with Mr. Toda about the ME310 class and the progress of the Stanford and TMIT teams. He was most interested in the "light curtain" development associated with camera-based tracking of gestures for human/automobile interaction. He suggested we file a patent disclosure on this, perhaps novel, application of the curtain technology. He also mentioned the Toshiba Motion Processor and suggested the team look into a CMOS camera system for the final version.
I also met Prof. Yoji Yamada of Toyota Institute. He and his family spent day with wife and children. In the evening we talked briefly about research, including a paper that one of his students gave me earlier in the day.
Okubo's students are also developing [avatars that
follow the motion (head and arms) of a person engaged in a teleconference]
with
one or more partners. The avatar images can be made to be facing each other,
sitting side-to-side, etc. The use of avatars cojuld be interesting for
Internet-based design collaboration. Studies by Prof. Larry Leifer's former
Ph.D. students at Stanford have shown that gesture is important element
of communication in design teams.
[ My daughter gets fitted up for teleconferencing
with avatars].
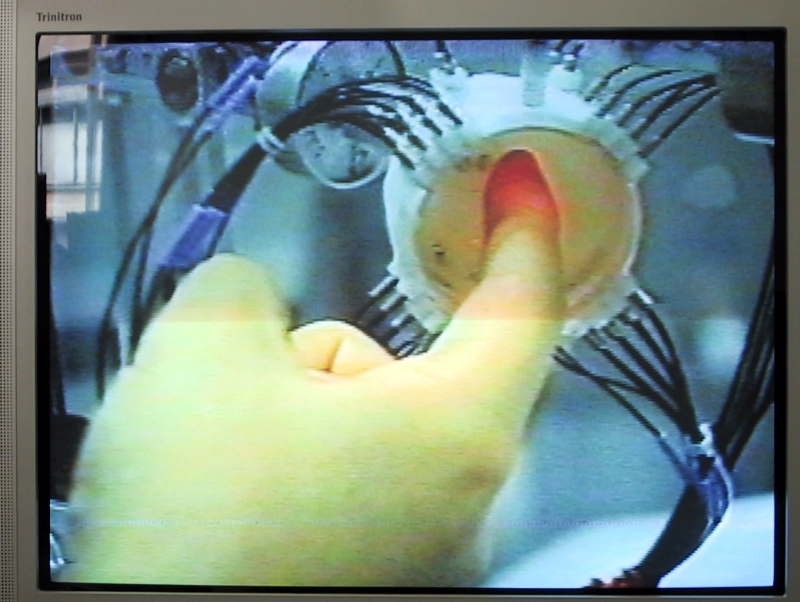
The previous planar haptic device using an array of LEDs and receptors
to track finger motion has been expanded to a hemispherical 3DOF verson.
When the user is moving freely in virtual space, the cup stays centered
around the fingertip; when the user makes contact with a virtual surface,
the cup comes into contact with the user's fingertip and applies a force
as well as eliciting cutaneous sensations
[screen shot of a finger inside the 3DOF haptic
interface cup].
Many conversations took place around the presentations. Issues included the difficulties in supporting spontaneous dialog among remote participants and the need to provide participants with a way to learn the "culture" and organizational structure of remote teams that they are collaborating with. Advances in video, virtual reality and communications technology needed.
- Prof. Shuichi Fukuda provided an introduction and explanation of the goals of the workshop.
- I gave a version of my presentation on "Developments in global project-based design education."
- Professor Mats Hanson (KTH, Sweden) gave a description of his goals in project-based education and also described ongoing work to design new multi-purpose spaces for project-based learning. An extensive program will be undertaken in Sweden to develop new buildings and facilities that are particularly suited for team- and project-based education.
- Prof. Dale Harris (Stanford Learning Lab) described recent initiatives and experiments undertaken by the Stanford Learning Lab to foster project-based learning, including collaboration with various overseas universities.
- Prof. Stephen Raper (University of Missouri, Rolla) described the work at his university on packaging design and educational initiatives associated with it.
- Professor Fukuda provided the summary and conclusions.
I also found a common theme regarding project-based education. It appears that many Japanese universities are considering adding one or more project-based courses. Virtually all of the faculty members who teach engineering courses had an interest in Stanford's ME310 course. They have come to the conclusion that Japanese higher engineering education is too "fact based" and that they need to adopt project courses to help students to use the engineering science they've learned. In some respects, this shift in philosophy is similar to one that took place in U.S. universities in the late 1980s. U.S. engineering education was also very fact-based and focused on engineering science in the late 1970s and 1980s. (This was perhaps a continuation of a trend that started in the 1960s as a reaction to the embarrassment of Sputnik, launched by the Soviet Union before America had any satellites.) Stanford was a leader in the project-based learning trend, launching a graduate design course involving industrial sponsors as early as 1970 [see slide from my PBL presentation].
Several professors at the University of Tokyo and elsewhere already run design courses with fairly open-ended project statements. Examples include the mechatronic robot-car projects run by Professor Ken Sasaki and the Stirling Engine project by Professors Hatamura, Nakao and Murakami at the University of Tokyo and the "Street Artist Robot" competition by Professor Shigeo Hirose at Tokyo Institute of Technology. The new focus is on design projects with industrial partnership and, perhaps, sponsorship. As discussed in my presentation, industrial partnership introduces substantial changes to project-based courses. To teach ME310 I rely heavily on a large group of alumni from the course who have gone into industry and are pleased to offer projects. I also rely on the alumni for coaching and interaction with the students. They are the resource that it would be most difficult for me to recreate if I were to start teaching ME310 at another school. In Japan the problem is particularly challenging as there does not seem to be a strong tradition of industrial participation in university research or teaching. A few professors, such as Hatamura at U. Tokyo, have numerous industrial contacts. Others have ties with a few companies who have commercialized some of their research. These ties are probably the best starting point for generating the industrial projects and liaisons that will be needed for courses like ME310 in Japan.
TMIT is in a position to be a leader of the Japanese project-based educational effort. In addition to Prof. Fukuda's energetic leadership, it has several structural advantages. It does not have the long tradition of science-based engineering courses that the Universities of Tokyo or Kyoto have. And it has a smaller faculty who are more easily able to execute a change in teaching paradigm. TMIT is also well equipped for distance-learning. These features have made TMIT a good partner in global team-based design exercise with Stanford's ME310 course for the past 1.5 years.
A related effort, discussed at some length with Prof. Shuichi Fukuda,
is the formation of some short courses to be attended by members of companies
that are interested in "creative team-based engineering." Such a course
would be based primarily on ME310a,
which contains most of the "content" regarding team formation, team dynamics,
creativity methods, etc. (This same interest is what lead Samsung to send
two of their design engineering to participate in ME310a in Fall 1999.)
The creation of such a course to be taught in Japan would be a significant
effort. However, once it had been set up, alumni of this course could continue
to teach in Japan with only occasional interaction from Stanford (see short
course section above for details.)
ME310 Design Development with Corporate Partners, course website and course description.
Mason, M.T. and Salisbury, J.K., Robot Hands and the Mechanics of
Manipulation, MIT Press, 1985.
.
![dexterous robot fingers with stress-rate sensing]](sasaki_fingers.JPG){kind=link}
![new device allows tele-grasping]](sasaki_tele.JPG){kind=link}
{kind=link}
![avatars that follow the motion (head and arms) of a person engaged in a teleconference]](okubo3.JPG){kind=link}
{kind=link}
{kind=link}