|
|
 |
Vehicle Model for Sideslip Estimation
The sideslip angle is defined by the angle between the velocity vector of the vehicle and the longitudinal axis. The figure below shows a bicycle model where the left and right wheel are lumped into a single wheel and vehicle roll is neglected. The sideslip angle is defined by BetaCG which is also the inverse tangent of uy,CG over Ux,CG.
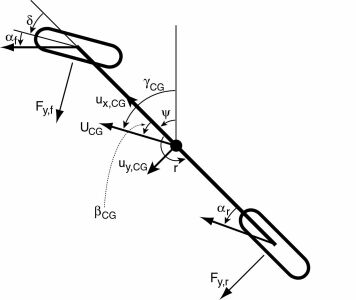
Bicycle Model
Since the two-antenna system is mounted on the vehicle roof (see bottom figure) the velocities measured by GPS are influenced by the roll rate. The accelerometers are also influenced by the extra gravity component when the vehicle has some roll component due to vehicle roll motion and/or grade. Since the two antenna system gives us the total vehicle roll angle (includes both vehicle roll and road grade) it is possible to compensate for these effects and improve the sideslip estimation
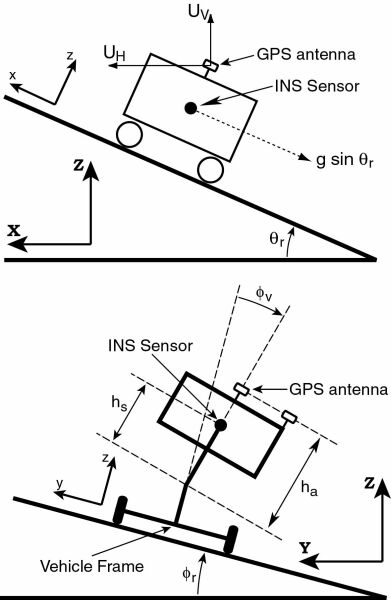
Grade and Roll Effects
Sideslip Estimation Home
|
|