|
|
 |
GPS Base Sideslip Estimation
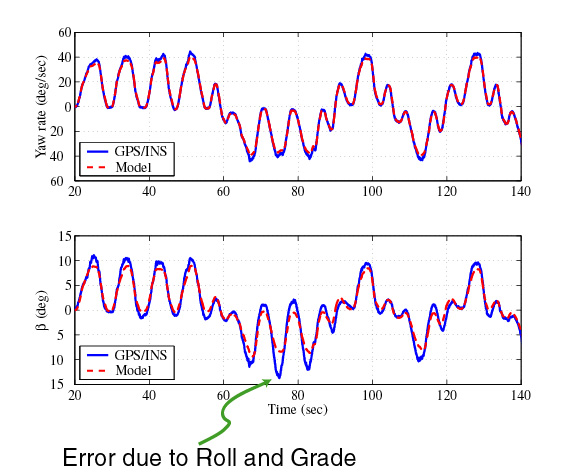
The plot below shows both the yaw rate and sideslip estimation compared to bicycle model simulations. The yaw rate between the estimate and the simulation are extremely close validating the model parameters. The sideslip estimate is quite good although there are points where the estimate overshoots the sideslip predicted by the bicycle model. These overshoots are a result of road grade and vehicle roll.
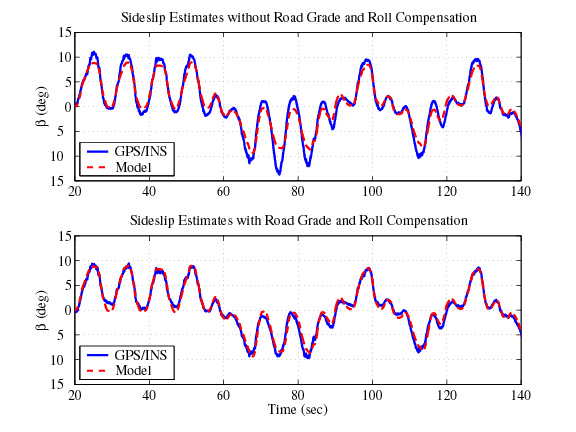
When compensating for the roll and grade effects this error is reduced significantly. The following figure shows a comparison between the sideslip estimation with and without roll and grade compensation.
Sideslip Estimation Home
|
|