
The Sprawlettes
"A small family of biomimetic siblings"
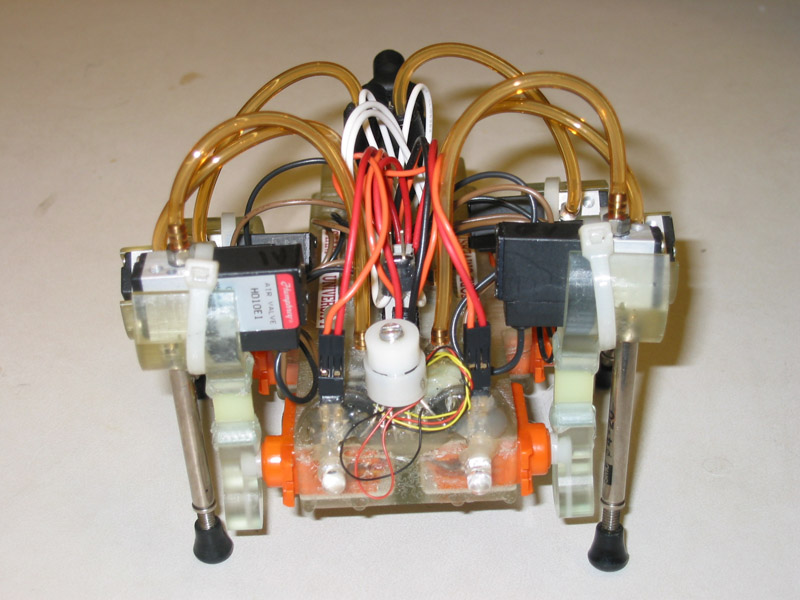
Sprawlette body #01 is currently equipped with modular legs that allow easy alterations to the stiffness.
It also has been outfitted with an analog compass (which unfortunately does not work well on our lab floor due to magnetic fields below), 2 light sensors and beacon mounting posts for LEDs using in overhead video capture.
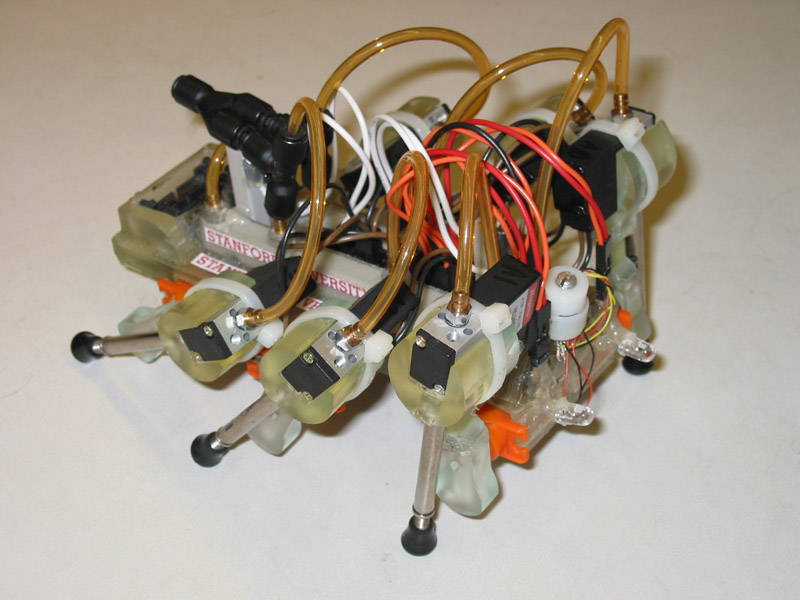

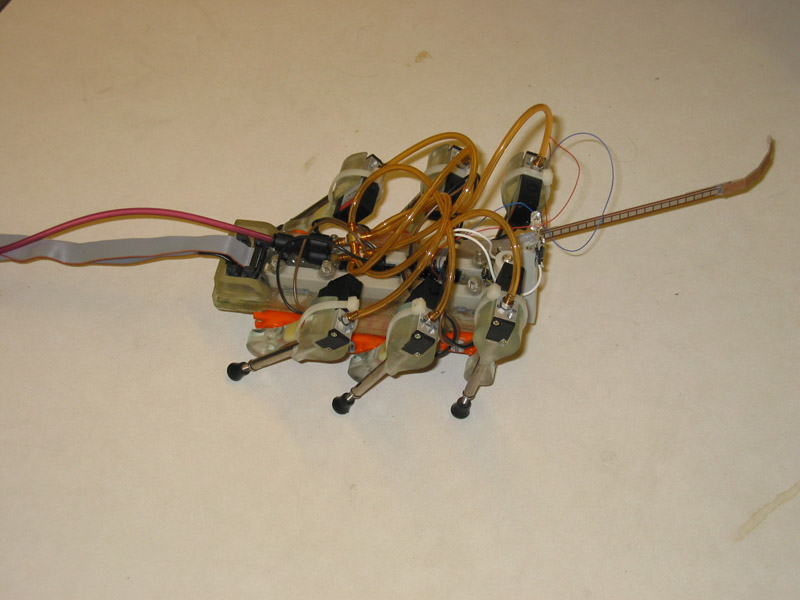
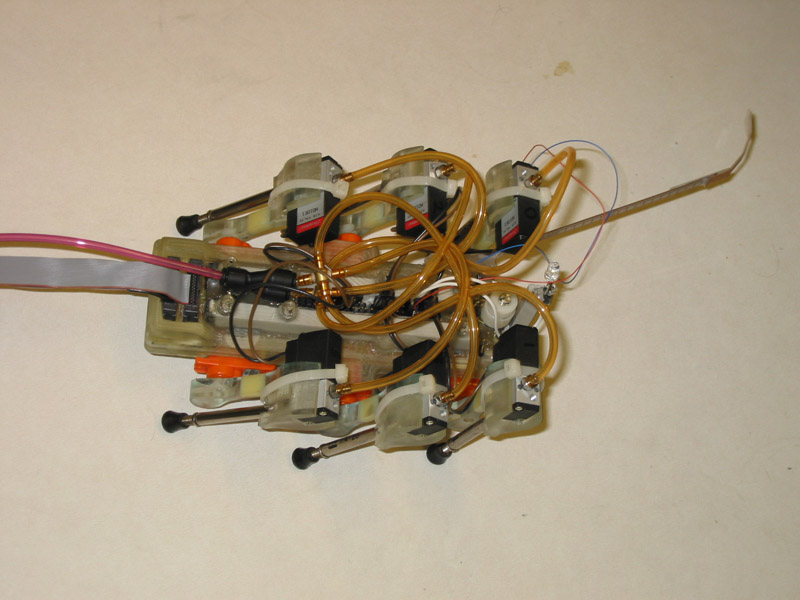
Sprawlette #02
Sprawlette body #02 has also been outfitted with an analog compass, 2 light sensors and beacon mounting posts for LEDs using in overhead video capture.
In addition to these sensors, body #02 has a body length antenna sensor that is being used to follow walls (similar to cockroaches).
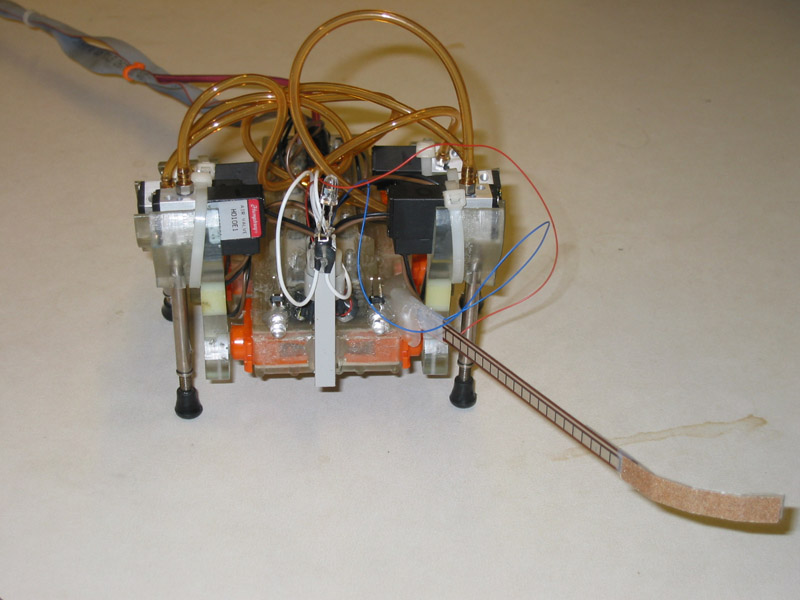
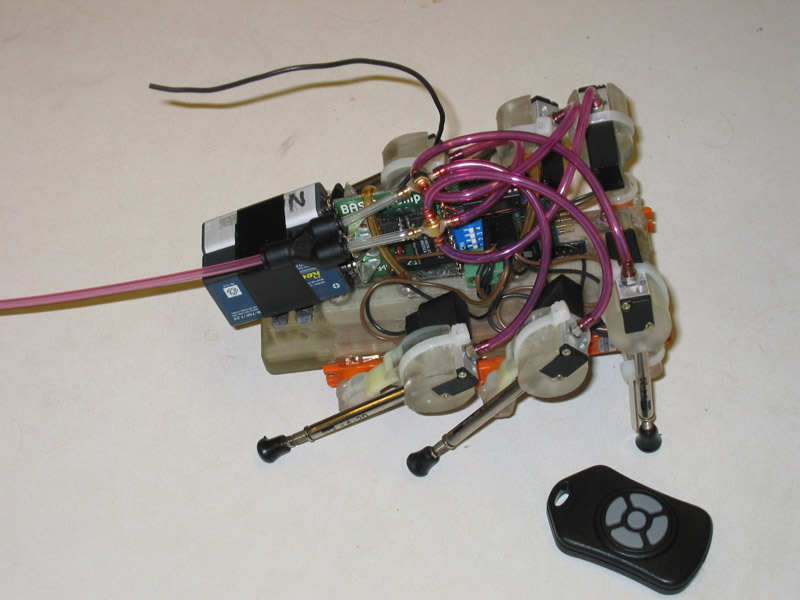
Sprawlette #04 - Porta-Sprawl
Sprawlette body #04 has been equipped with compliant legs that were designed based on ADAMS dynamic simulations with added payloads.
It carries a BASIC Stamp controller and RF receiver along with a battery pack to become near autonomous. Only a line for a compressed air supply is required to run the robot.
It can be controlled remotely by a key fob transmitter.
For more information on the design of the bodies click here.