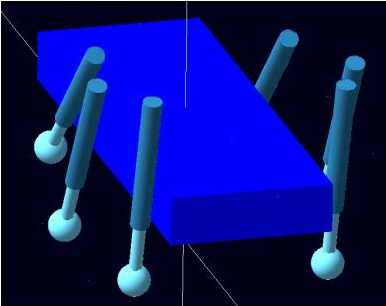
vSprawl is a full 3D model with geometric similarity to robot
- Rigid body with six legs
- Linear pneumatic actuators (variable force)
- Spring-damper rotational joints in sagittal plane
- Friction and ground contact models
We built a detailed dynamic model in order to:
1) Test hypotheses for improved locomotion such as:
Increasing back leg stroke yields faster running
There is an optimal leg stiffness/angle configuration for a particular
terrain (if so, what is it?)
2) Explore the space of locomotion mechanisms:
What changes in Sprawl would improve fit to SLIP model?
What are the trade offs for such a change?
Movie of sprawl running
Sprawl.avi
(2.6 meg)
Note: movie is slowed to about 1/30 of actual speed.
Description of the model and its calibration
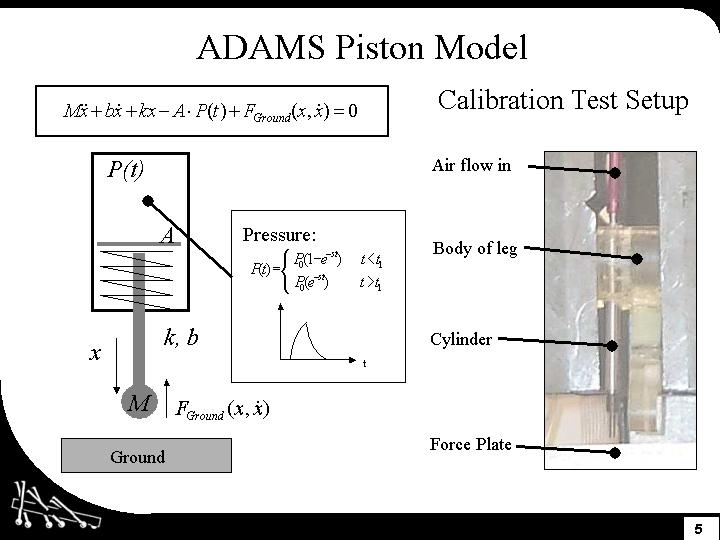
This first slide shows a diagram of the piston
model used in the ADAMS simulation next to a picture of the actual
robotics leg. The piston is driven by a valve controlled 100psi pressure
source. When the valve is opened the pressure in the piston rises in an
approximately exponential fashion. When the pressure is vented, a
spring inside of the piston retracts the leg. The spring stiffness,
piston damping, and time constant for the pressure rise were all tuned
to match the physical system.
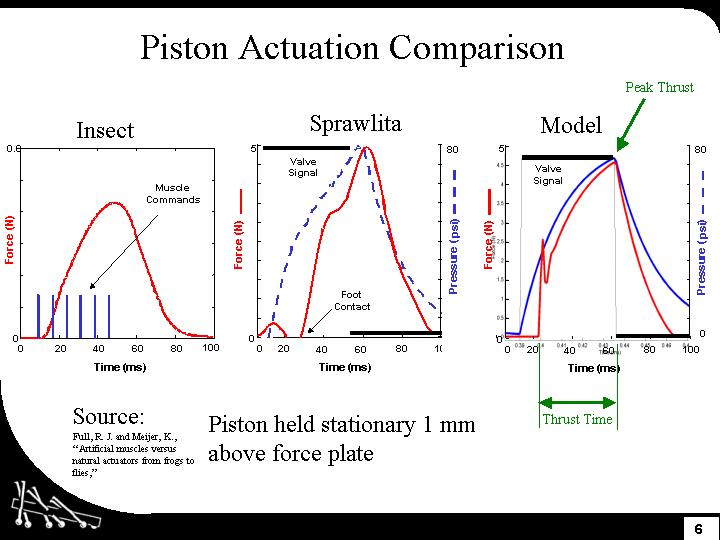
The pressure and force profiles for a leg held a fixed distance above the ground are shown in this slide comparing the actuation profiles of the model and the robot. Also shown is the stimulus and force profiles from an insect leg. One of the advantages of using pneumatics is the roughly biomimetic force profiles generated by the thrusting legs.
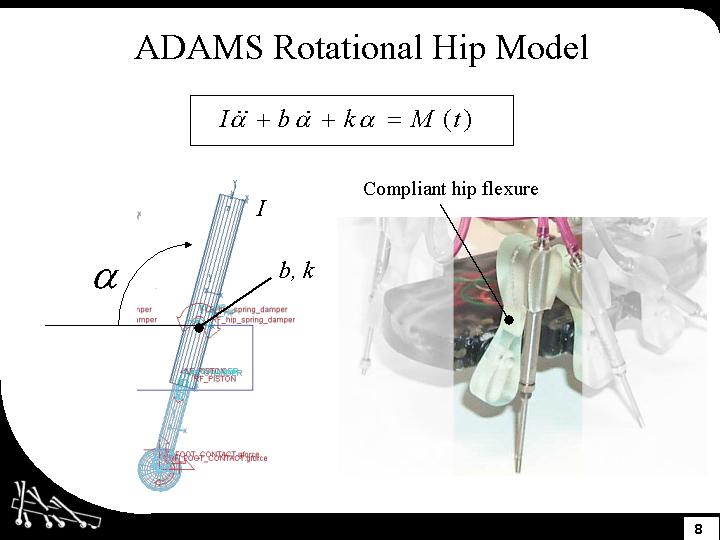
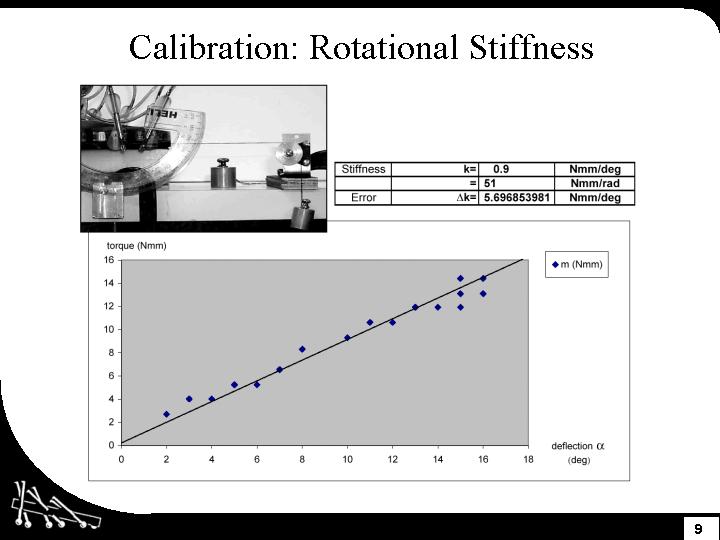
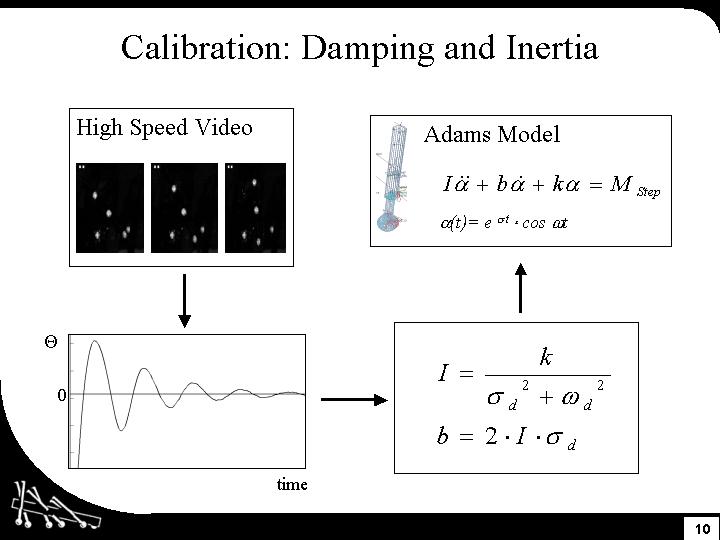
Each leg of the model contains a hip model including a passive revolute joint meant to capture the effect of the robot's compliant hip flexures. Each joint has both a stiffness and damping associated with it. A static calibration was carried out to determine the stiffness of each joint. In addition a dynamic calibration was performed via high speed video to determine the effective damping of each leg.
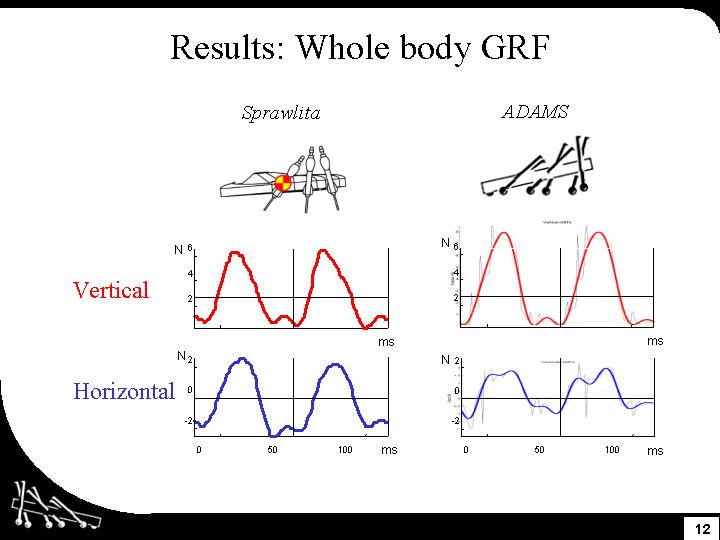
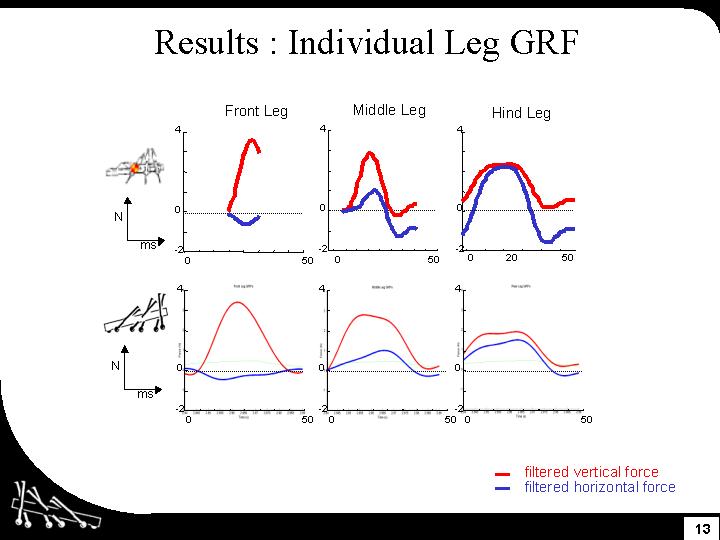
An accurate calibration of the model to the physical parameters of the robot gives vSprawl what in this video appears to be sprawita-like motion. A better measure, however, of the models ability to capture the essential dynamics of the robot can be seen in looking at the ground reaction force. The vertical and horizontal whole body GRFs show that there is indeed a striking similarity between the two, not only in magnitude and profile, but also in phasing. Further investigation into the individual leg GRFs shows that while not exactly the same as the robot, each leg provides a similar function: the front legs lift and slow the robot, while the middle and rear legs provide most of the forward thrust. In both case, comparison with insect data shows that the rear legs drag that the end of the stroke, an inefficiency that insects do not share.
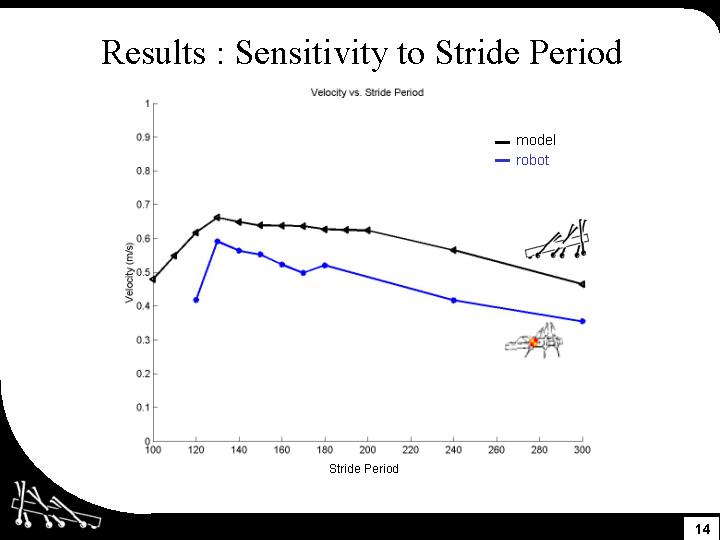
Of interest in controlling the robot is the the following plot showing
the speed vs. stride period of the robot
versus the model. Of particular note is the fact that the both curves
show a similar bi-linear trend, with a peak at the same actuation frequency.
One reason the model runs faster than the robot is the unmodeled effect
of the drag of the robot's tether on the treadmill. One more good
reason to go untethered!
Some future work and guiding questions:
How can Sprawlita be made more efficient?
What changes need to make rear leg extensors effective?
Would adding axial compliance to legs help?
What would be the cost/benefit of such changes?
Terrain Adaptation:
What changes in leg angles and thrust timing are
needed?
How would the robot respond to rough terrain, perturbations?
What are the effects of adding horizontal sprawl?
Increased maneuverability?
Greater horizontal stability?
At what cost to speed, efficiency?
Insight into scaling laws:
What do I need to change to make a micro sprawl?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}